

释放双眼,带上耳机,听听看~!
物料
- 纸板
- 剪刀或刀具
- 胶枪或胶带
- 1个回形针
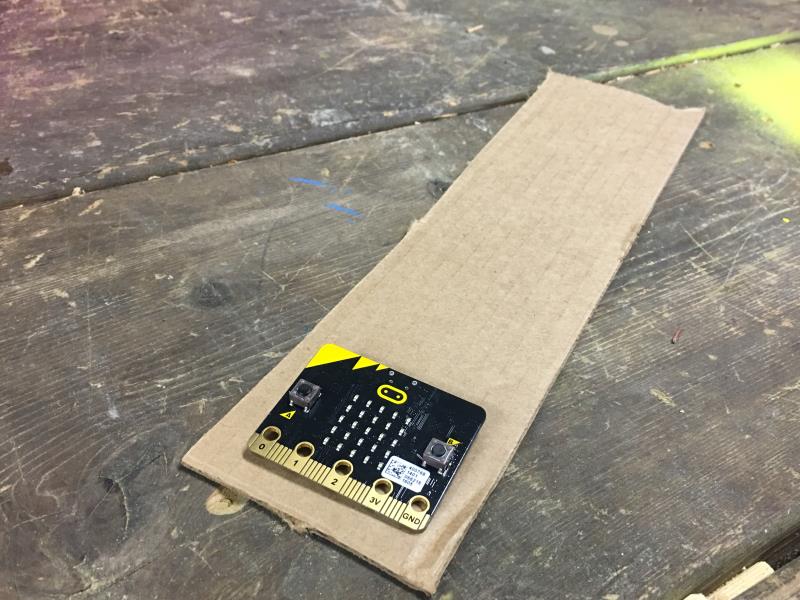
第1步:纸板
裁剪出一个矩形纸板。您可以使用micro:bit作为尺子来量尺寸。
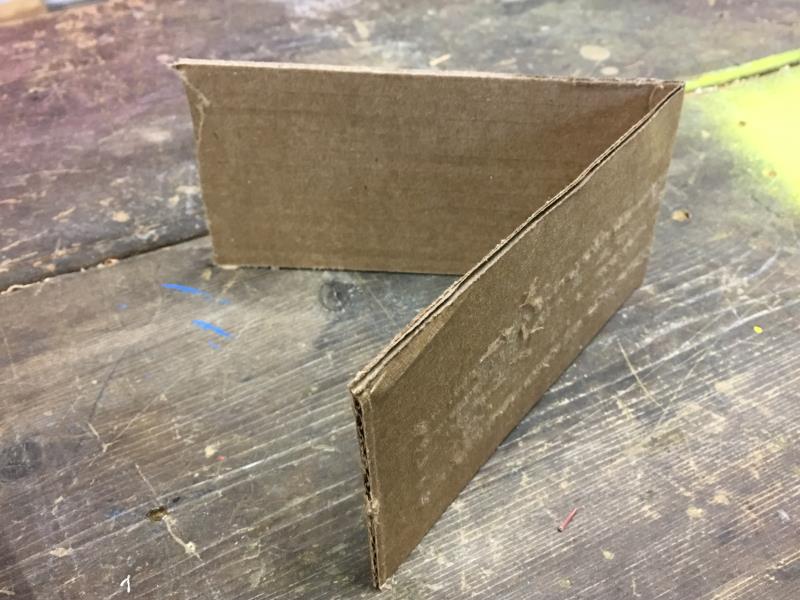
第2步:中间折叠
在长边中点将纸板折叠一下。
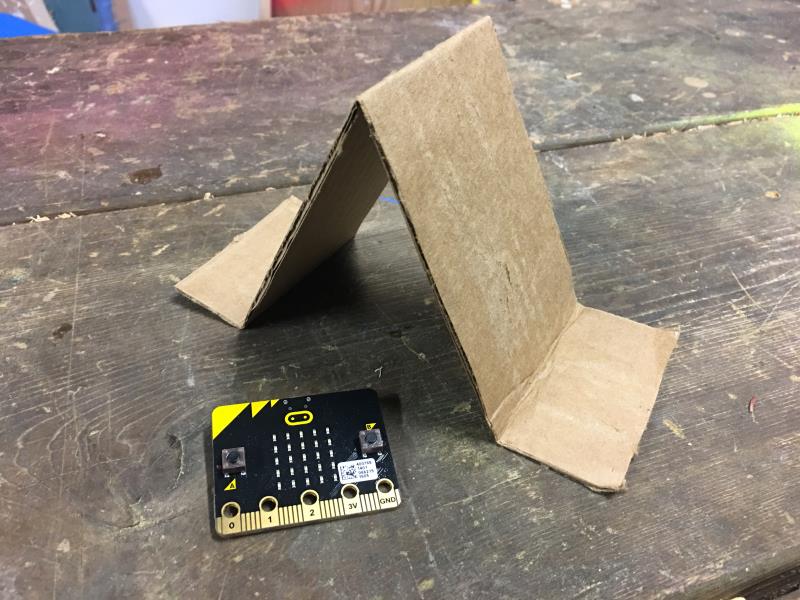
第3步:身体拱
在两端平放两个较小的折叠,平放在地面上。这是身体的基础。
第4步:前抓
折叠在纸板一端的每个角落。

第五步:后腿
使用剪刀或刀具,在另一端切开狭缝,裁剪成手指形状。

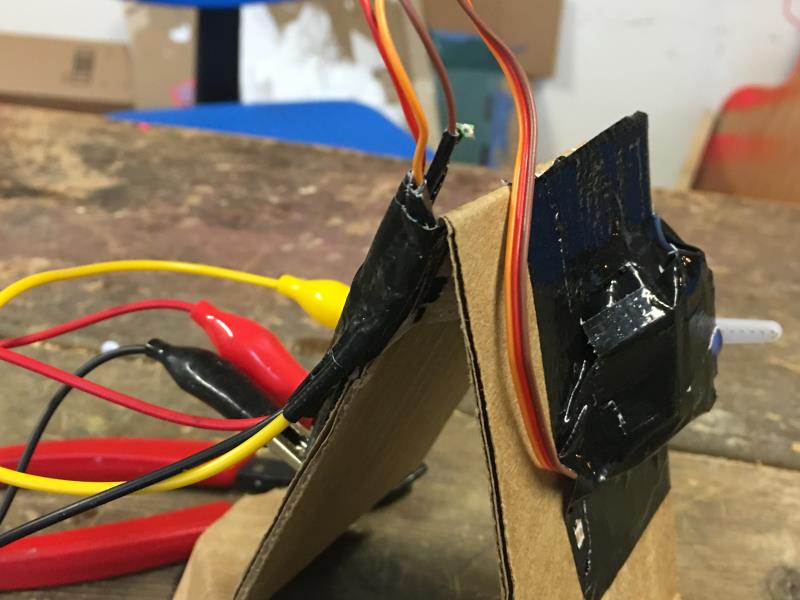
第6步:安装电路板
使用胶带或胶枪,将micro:bit安装在一侧。
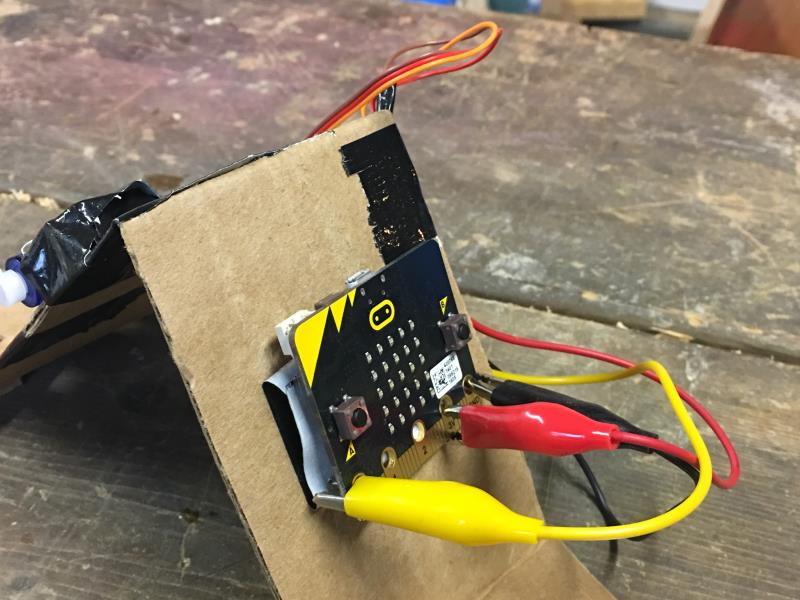
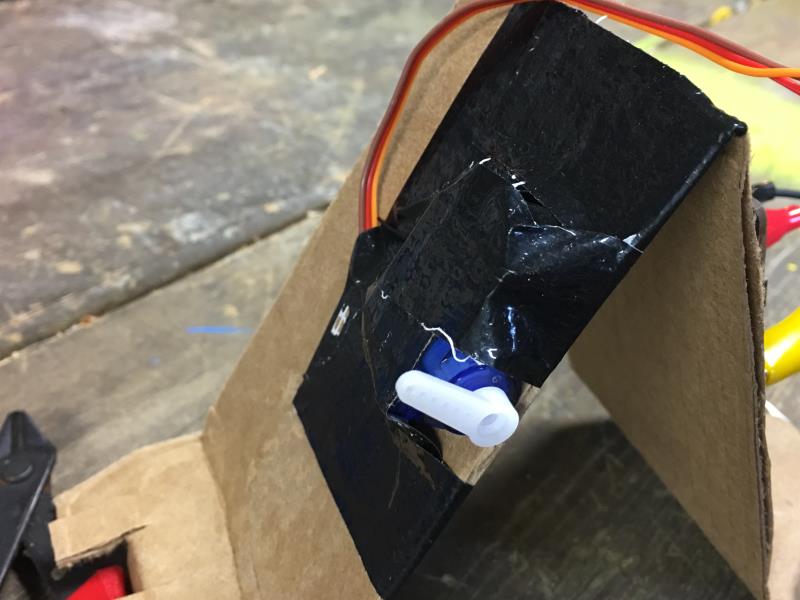
第7步:安装伺服
将伺服(带胶带或胶水)安装在纸板另一侧的边缘。
第8步:清理电缆(可选)
使用胶带将电缆很好地布置在机器人上。
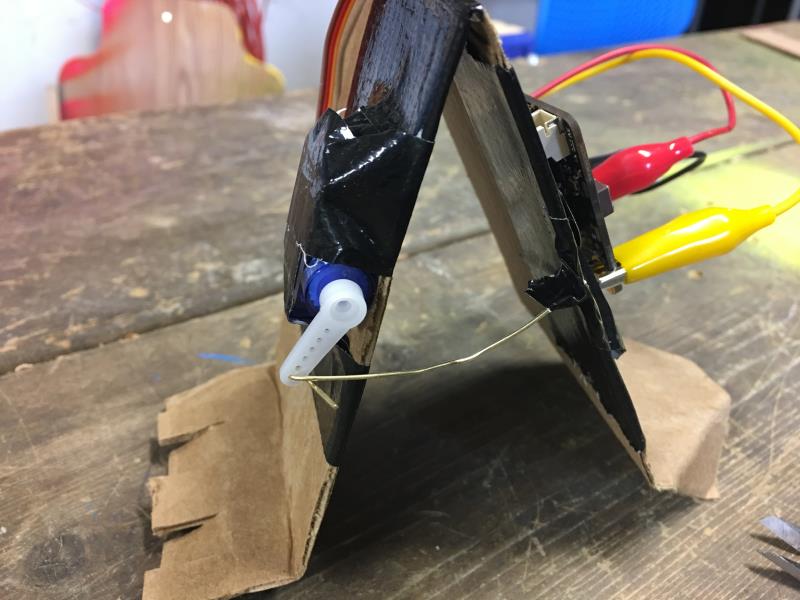
步骤9:将回形针连接到伺服
展开回形针并将其安装到伺服臂上。

步骤10:将纸夹连接到纸板上
将折叠的折叠部分滑入纸板,然后用胶带固定。您可能需要使用夹子的大小来玩具,以便伺服旋转足以打开机器人
第11步:准备好了!
你的机器人准备好了!

代码
为了机器人挪动,micro:bit需要命令伺服以一定速度在度0和180度之间移动。按下A按钮时,下面的代码开始移动机器人
控制端
这部分你还需要一个micro:bit。我们可以用另一个micro:bit控制机器人。将下面的代码下载到尺寸上的micro:bit,然后再下载到“控制器”micro:bit上。每当按下按钮A时,机器人就移动一次。
dio.onDataPacketReceived(({receivedNumber}) => {
pins.servoWritePin(AnalogPin.P0, 0)
basic.pause(500)
pins.servoWritePin(AnalogPin.P0, 180)
basic.pause(500)
})
input.onButtonPressed(Button.A, () => {
radio.sendNumber(0)
})


