
释放双眼,带上耳机,听听看~!
详情参照CMPS10带倾斜补偿电子罗盘使用手册
简介
CMPS10模块是倾斜补偿罗盘。CMPS10采用3轴磁力计和3轴加速度计以及功能强大的16位处理器,旨在消除PCB倾斜引起的误差。CMPS10产生0-3599的结果,表示0-359.9或0到255.测量磁场的x,y和z分量的三个传感器的输出以及俯仰和滚动用于计算轴承,每个这些组件也可以原始形式提供.CMPS10模块需要3.6 – 5v的电源,并提供25mA的标称电流。从模块,串行接口,I2C接口或PWM输出获取轴承有三种方法。
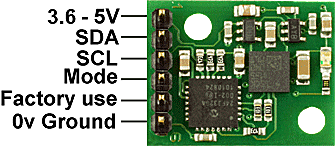
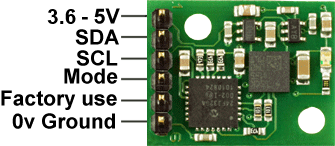
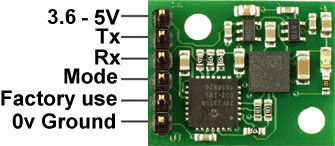
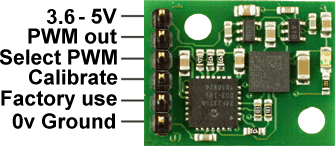
模式选择
有关每种模式的数据,请单击模式标题。请注意,CMPS10仅在上电时查看模式选择引脚。
| I2C模式 | 串行模式 | PWM模式 |
 |
 |
 |
| 要进入I2C工作模式,请 保持模式引脚不连接 |
要进入串行操作模式, 请将模式引脚接地 |
要进入PWM工作模式, 请将选择PWM引脚连接到地 |
该工厂使用脚仅供我们的内部测试,此引脚应保持悬空。
数据更新频率
倾斜补偿航向的更新发生在75hz,数据通过45个采样缓冲区进行过滤,这意味着每640ms就完成一次缓冲区刷新。来自磁力计和加速度计的原始数据每13.3ms提供一次。
PCB钻孔位置
下图显示了CMPS10 PCB安装孔位置。



