

释放双眼,带上耳机,听听看~!
FlyMaple传感器外观FlyMaple说明技术规格引脚定义图Flymaple pin连接windows系统驱动安装:
FlyMaple传感器外观

FlyMaple说明
- FlyMaple 是一个开源惯性导航控制板。
- 可以用到例如四轴飞行器、固定翼无人飞机、两轮自平衡、三轴电子罗盘、登山高度计等需要姿态及其罗盘和气压计的项目。
- FlyMaple基于maple开放的编程结构,使很多爱好者都可以加入进来进行二次开发。
- 32位处理器高达90MIPS的运算可以满足复杂的计算需要。
技术规格
- 使用STM32RET6 ARM 32位处理器,FLASH ROM 512K,RAM 64K,主频72MHZ。
- 集成ITG3205 3轴陀螺仪。
- 集成ADXL345 3轴加速度传感器。
- 集成HMC5883 3轴电子罗盘
- 集成BMP085 高精度气压高度计
- 具备6路3PIN结构GPIO引出,可方便控制6路电调或舵机
- 具备8路3PIN结构GPIO引出,可用于捕捉航模RC接收器输出
- 支持USB供电与外部供电自动切换。
- 具备外扩串口,可外接GPS模块。
- 具备外扩I2C接口,可连接例如测量高度的超声波模块。
- 具备外扩串口,可连接无线通信模块。
- 另外引出了一个标准的Arduino排母插槽。可以在上面叠加一些Arduino Shiled扩展模块。
- 输入电压:接上USB时无须外部供电或外部供7V~12V DC输入。
- 输出电压:5V DC输出和3.3V DC输出 和 外部电源直接输出。
- 尺寸:长50mm X 宽50mm X 高12mm。
- 重量:15克。
引脚定义图
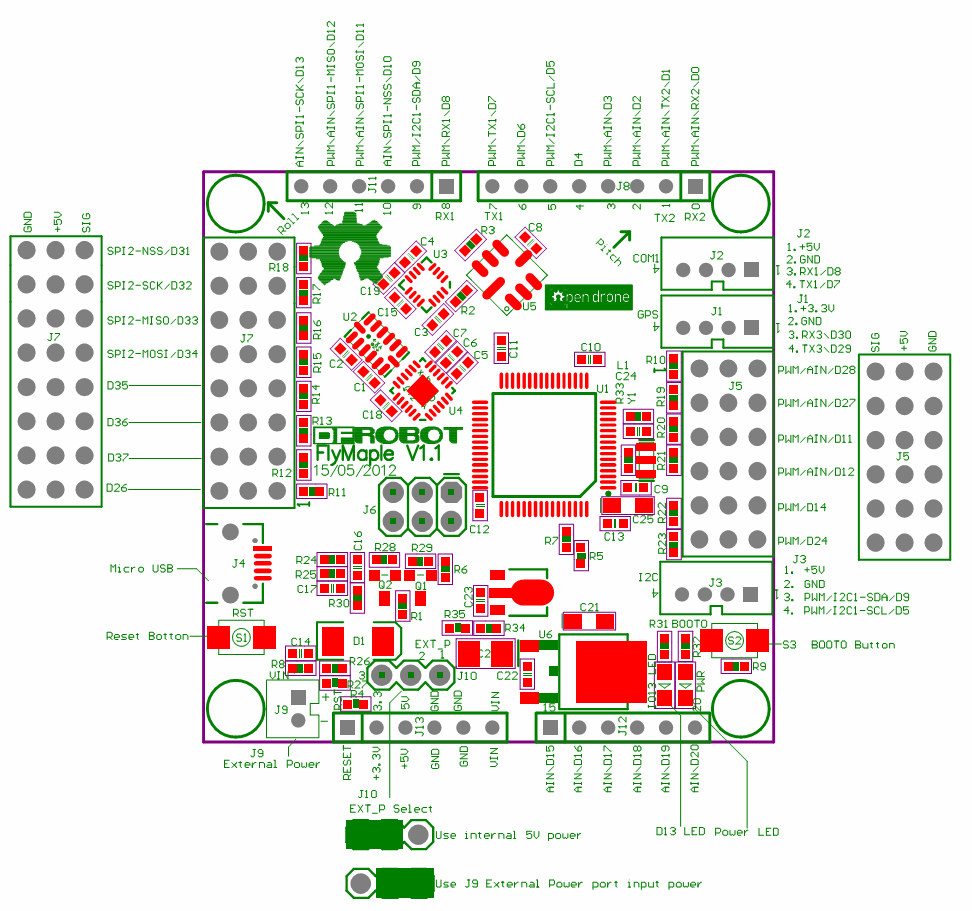
- Micro USB 端子(J4):这个端子可用来下载程序和USB串口通信,在调试程序的时候也可以把一些调试状态发送出来,是调试代码的好方法,同时这个接口也可以用来给板子供电。供电电流最大500毫安。
- 复位按钮(S1) :按下后将使板子复位,在USB串口通信中如果复位将丢失串口号。有时候在编程的时候没有选择正确下载串口号,这时烧写停留在寻找端口状态,可以按复位按钮来完成烧写。
- 外部电源输入(J9 ) :这个端子可以输入7-15V电压,内部带稳压电路可以将输入电压稳定到5V,使用外部电源还需要将EXT_P(J10)跳针端子跳到外部电源供电位置。
- 电源选择跳针(J10) :用于使能外部电源输入。
- J8、J11、J12、J13 :这几个排母可以在上面叠加一个Arduino标准间距的Shield。
- BOOT0 按钮(S2) :这个按钮是板上按钮可以用 waitForButtonPress();等函数来读取。
- 1号I2C接口(J3) :这个I2C端口可以用来挂接一一些I2C模块,例如经常用到的SRF02超声波模块。
- GPIO接口(J5) :接口具备6组3Pin端子,每个IO口都可以独立产生PWM信号,这6个端口用来控制电调和舵机非常方便。
- 串口3接口(J1) :接口可用于连接一个GPS等外设,使用串口3。注意这个端子供电是3.3V。只能接3.3V外设。
- 串口1接口(J2) :串口1接口,这个接口供电是5V,只能接5V外设,可以用来连接无线通信模块。
- GPIO接口(J7) :接口具备8组3Pin端子,可用于连接航模无线接收器或者一些传感器。
windows系统驱动安装:
1.dfu驱动:按下RST键放开后蓝色指示灯会先快速闪烁,立即按下BOOT0键,在慢闪烁时放开此键,这时蓝色指示灯会一直慢闪烁闪烁保持在bootloader等待下载程序,这时系统会提示安装驱动,选择手工选择驱动位置,选择maple IDE目录下driver/dfu目录,系统会自动安装驱动。
2.usb 虚拟串口驱动:打开maple IDE,点击file》example随便选择一个例程下载到板中,按下reset键运行程序系统会自动提示要求安装虚拟串口驱动程序,选择手工选择驱动位置,选择maple IDE目录下driver/serial目录,系统会自动安装驱动。
上传程序的小技巧:
按下RST键当蓝色指示灯快速闪烁时,立即按下BOOT0键,在慢闪烁时放开此键,这时蓝色指示灯会一直慢闪烁保持在bootloader等待下载程序,这时点击IDE中的上传程序键即可开始编译和下载,不需要选择串口。如有错误和提示信息会显示在下方的状态窗口。
应用领域
- 多轴飞行器。
- 两轮自平衡车。
- 室内惯性导航。
- 登山高度计。
- 惯性遥控设备。
资料下载
本文整理于DFRobot wiki


