

本文是有关流行的超声波传感器HC – SR04的指南。我们将解释其工作原理,向您展示其某些功能,并分享一个您可以遵循的Arduino项目示例,以将其集成到您的项目中。我们提供了有关如何连接超声波传感器的示意图,以及与Arduino一起使用的示例程序。
描述
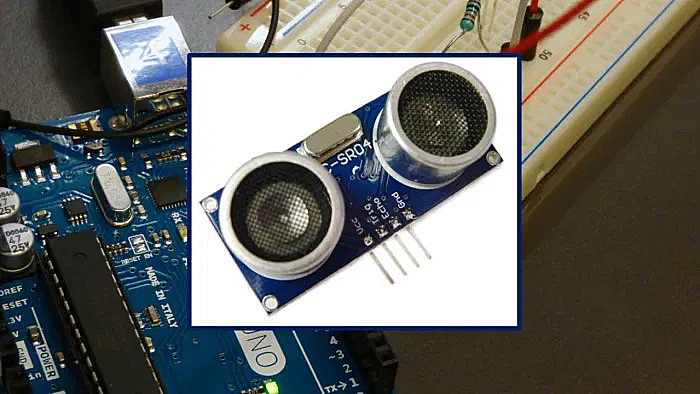
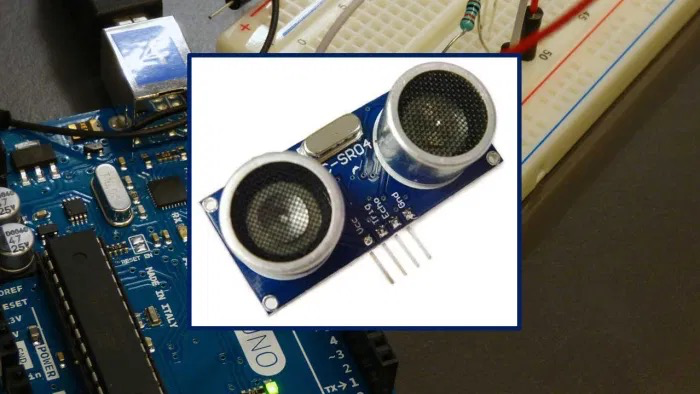
HC-SR04超声波传感器像蝙蝠一样使用声纳来确定到物体的距离。它以易于使用的包装提供出色的非接触范围检测,具有高精度和稳定的读数。它带有超声波发射器和接收器模块。
特征
以下是HC-SR04超声波传感器的一些功能和规格列表:
- 电源:+ 5V DC
- 静态电流:<2mA
- 工作电流:15mA
- 有效角度:<15°
- 测距距离:2cm – 400 cm / 1“ – 13ft
- 分辨率:0.3厘米
- 测量角度:30度
- 触发输入脉冲宽度:10uS
- 尺寸:45mm x 20mm x 15mm
它是如何工作的?
超声波传感器使用声纳来确定到物体的距离。这是发生了什么:
- 发射器(触发针)发送信号:高频声音。
- 当信号找到一个物体时,它会被反射并…
- ……发射器(回波引脚)接收它。
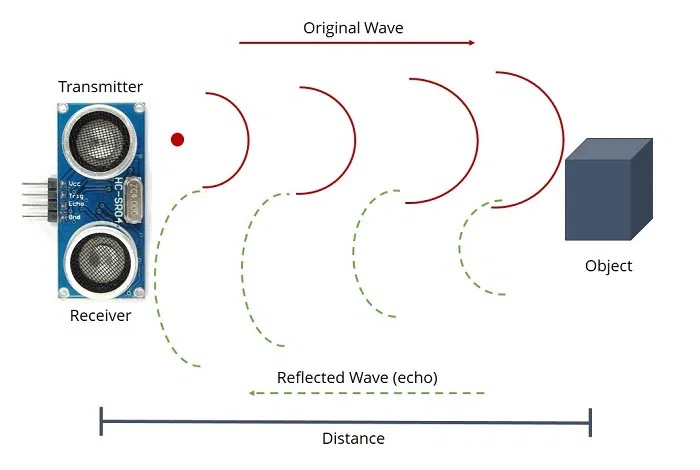
信号发送和接收之间的时间使我们能够计算到物体的距离。这是可能的,因为我们知道声音在空气中的速度。
HC-SR04超声波传感器引脚

引脚
- VCC:+ 5VDC
- Trig:触发(输入)
- Echo:回声(输出)
- GND:地线
带有HC的Arduino – SR04传感器
该传感器在Arduino修补匠中非常受欢迎。因此,在这里我们提供了有关如何在Arduino上使用HC-SR04超声波传感器的示例。在该项目中,超声波传感器在串行监视器中读取并写入到对象的距离。
该项目的目的是帮助您了解该传感器的工作原理。然后,您应该能够在自己的项目中使用此示例。
注意:有一个名为NewPing的Arduino库,可以在使用此传感器时使您的使用更轻松。
NewPing库:在此处下载库。
所需零件
这是遵循下一个教程所需的部分的列表:
- Arduino UNO
- 超声波传感器(HC-SR04)
- 面包板
- 杜邦线
原理图
按照下一个示意图将HC-SR04超声波传感器连接到Arduino。
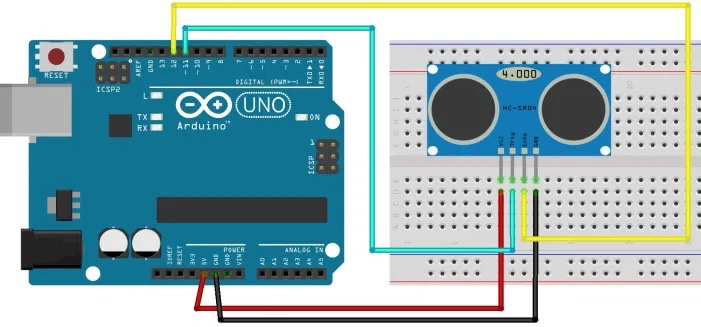
下表显示了您需要建立的连接:
| 超声波传感器HC-SR04 | Arduino的 |
| VCC | 5伏 |
| 触发 | 销11 |
| 回声 | 针脚12 |
| 地线 | 地线 |
代码
将以下代码上传到您的Arduino IDE。
/*
*
* Complete Guide for Ultrasonic Sensor HC-SR04
*
Ultrasonic sensor Pins:
VCC: +5VDC
Trig : Trigger (INPUT) - Pin11
Echo: Echo (OUTPUT) - Pin 12
GND: GND
*/
int trigPin = 11; // Trigger
int echoPin = 12; // Echo
long duration, cm, inches;
void setup() {
//Serial Port begin
Serial.begin (9600);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// Convert the time into a distance
cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343
inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(250);
}
代码如何工作
首先,您为触发和回显引脚创建变量,称为 TrigPin 和 回声针, 分别。触发引脚连接到数字 针脚11,并且回音针连接到数字 针脚12:
int trigPin = 11;
int echoPin = 12;
您还将创建三个long类型的变量: 期间, 厘米和 英寸。这期间变量可节省发射和接收信号之间的时间。这 厘米 变量将以厘米为单位保存距离,并且 英寸 变量将以英寸为单位保存距离。
long duration, cm, inches;
在里面 setup(),以9600的波特率初始化串行端口,并将触发引脚设置为输出,并将回显引脚设置为输入。
//Serial Port begin
Serial.begin (9600);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
在里面 loop(),通过发送10微秒的HIGH脉冲来触发传感器。但是,在此之前,请提供一个短的LOW脉冲,以确保获得干净的HIGH脉冲:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
然后,您可以从传感器读取信号-一个HIGH脉冲,其持续时间是从信号发送到接收到对象的回波之间的时间(以微秒为单位)。
duration = pulseIn(echoPin, HIGH);
最后,您只需要将持续时间转换为距离即可。我们可以使用以下公式计算距离:
距离=(传播时间/ 2)x声速
声音速度为:343m / s = 0.0343 cm / uS = 1 / 29.1 cm / uS或以英寸为单位:13503.9in / s = 0.0135in / uS = 1 / 74in / uS
我们需要将 传播时间 乘以2,因为我们必须考虑到声波已发送,撞击物体,然后返回到传感器。
cm = (duration/2) / 29.1;
inches = (duration/2) / 74;
最后,我们在串行监视器中打印结果:
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
NewPing的源代码
您也可以使用NewPing库。文章最后面下载
安装NewPin库后,您可以上传下面提供的代码。
#include <NewPing.h>
#define TRIGGER_PIN 11
#define ECHO_PIN 12
#define MAX_DISTANCE 200
// NewPing setup of pins and maximum distance
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600);
}
void loop() {
delay(50);
unsigned int distance = sonar.ping_cm();
Serial.print(distance);
Serial.println("cm");
}
代码如何工作
使用NewPing库获取到对象的距离要简单得多。
首先包括NewPing库:
#include <NewPing.h>
然后,定义触发和回波引脚。触发引脚连接到Arduino数字针脚11,并回传到 针脚12。您还需要定义MAX_DISTANCE 变量才能使用该库。
#define TRIGGER_PIN 11
#define ECHO_PIN 12
#define MAX_DISTANCE 200
然后,您创建一个 NewPing 实例称为 sonar:
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
在里面 setup(),则以9600的波特率初始化串行通信。
Serial.begin(9600);
最后,在 loop(),要获取距离,您只需使用 ping_cm() 上的方法 sonar目的。这将为您提供以厘米为单位的距离。
unsigned int distance = sonar.ping_cm();
如果您想获得以英寸为单位的距离,则可以使用 sonar.ping_in() 反而。
故障排除
注意:“如果HC-SR04没有收到回声,则输出永远不会变低。Devantec和Parallax传感器分别在36ms和28ms之后超时。如果您按上述方式使用Pulsin,则没有返回回显,程序将挂起1秒钟,这是Pulsin的默认超时时间。您需要使用timeout参数。
HC-SR04几乎无法工作到10英尺,因此总路径长度为20英尺,路径时间约为20ms,因此请将超时设置为25或30ms以上。
如果您在E和T之间放置一个电阻,比如说2k2,则仅连接到T,您可以仅从一个Arduino引脚使用HC-SR04。查找超声波传感器的单针操作。
另外,如果您将HC-SR04与PicAxe配合使用,则需要将时钟速度提高到至少8MHz,否则它们将看不到回波脉冲的开始,因此脉冲输入将永远不会开始。HC-SR04与BS2配合良好。”


