

释放双眼,带上耳机,听听看~!
需要的配件
1x Arduino Nano
3x MG996R伺服系统(我使用了一个Futaba,因为我只有两个MG996R并且没有必要有很大的转动扭矩)
1x微伺服
2x双轴操纵杆
1x 6V稳压器
1x电池
其他项目:双面PCB覆盖光刻胶,二极管,电容器,开关,Arduino Nano插座,带连接器的带状电缆,PCB支架,螺丝,推杆自行车辐条,连杆止动器。
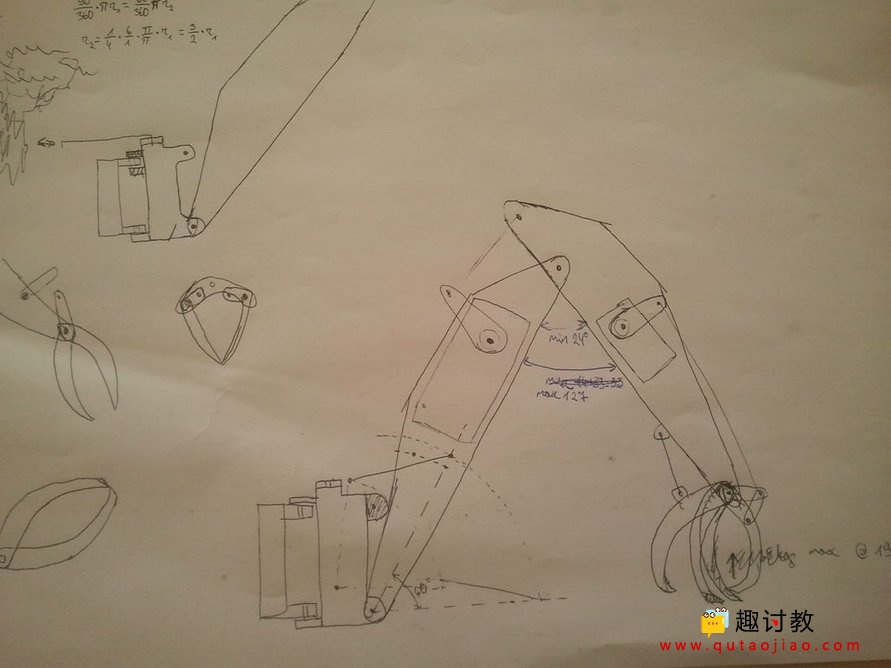
第1步:草绘和建模
使用AutoCAD我制作了一个3D模型。这是生产过程中最长的一步。如果您想查看或采取一些想法,我会附加AutoCAD和.stl文件。我还画了一个控制操纵杆的轮廓。
Arduino机器人手臂-AutoCAD.zip
提取码:无
解压码:无
3D零件由矩形管制成。这样做的原因是我想制作铝管机器人,但是当我开始时,我意识到这是一个太大的挑战。弯曲的地方破了,所以它必须很热,但我没有设备,所以我跳到了3D打印技术。
第2步:组装
生产的最佳部分是装配。我需要做的就是插入伺服系统,制作辐条铰链,弯曲并连接推杆的辐条。


第3步:编程和PCB生产
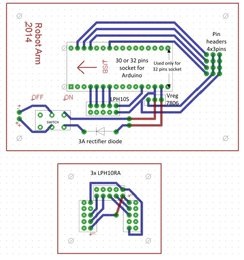

首先,我在面包板上制作了测试电路,并用Arduino软件编写了一个程序。我在这里附上代码。然后我用Eagle软件绘制了测试电路并将其打印在透明纸上,几乎可以在任何办公室购买。之后,我从PCB上剥下覆盖膜,进行电路方案并使用节能灯曝光板。我制作了2块板,一块用于机器人,一块用于控制操纵杆。接下来的步骤是在碱浴中清洗左光敏电阻并在蚀刻后。蚀刻后,我钻了孔,PCB已准备好焊接。
PCB&Arduino代码.zip
提取码:无
解压码:无
第4步:底座和操纵杆组装,焊接
我用胶合板制作底座和操纵杆。当焊接PCB时,我将它们连接到胶合板上。这里有两个设计PCB的错误:
- 控制操纵杆PCB的下孔部分被连接器插座覆盖,因此不可能通过它们将板拧紧;
- 进入机器人的连接器插座放置不正确。我弄乱了针脚,所以我不得不将它倒挂。
最后两件事是连接所有电线并校准运动。
就是这样,这里完成了机器人手臂。




