
简介
随着科技的发展,自动化程度也越来越高,人们可以从重复性的工作岗位转向更有意义的职业。
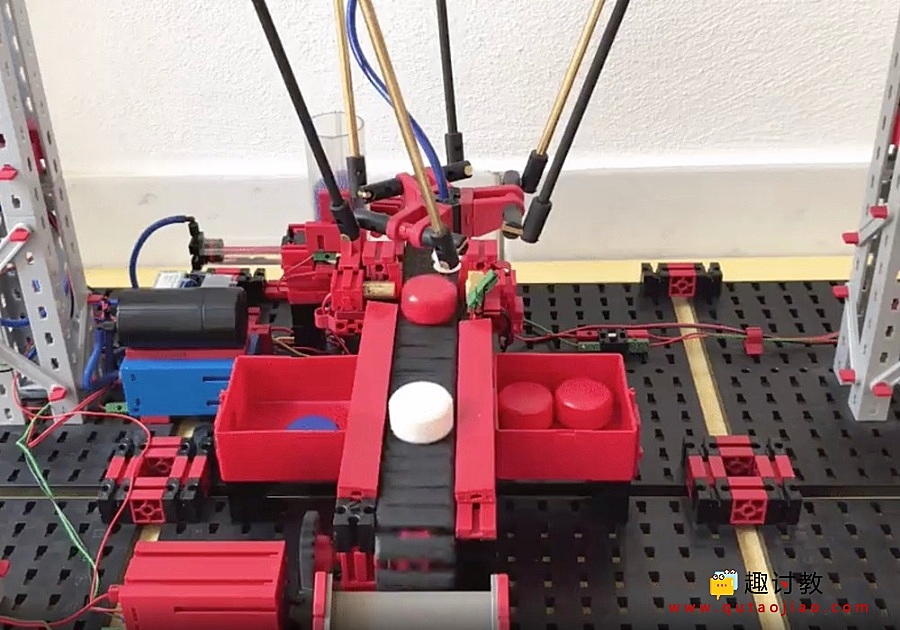
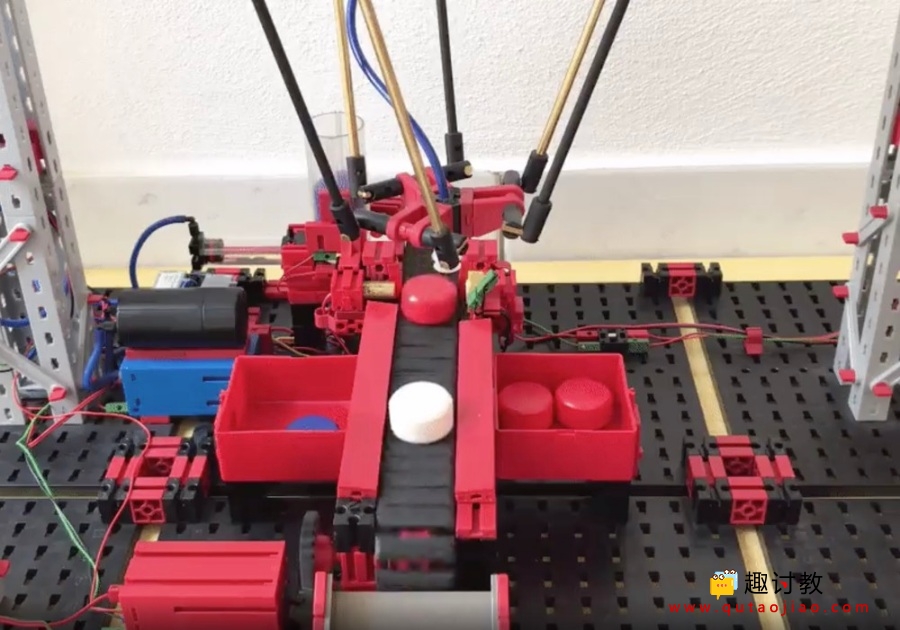
制造工业机器人并不一定意味着在昂贵的硬件上花费大量资金。这款分拣机器人就是由Arduino Mega控制而成,是一款相当简单的机器。尽管如此,它并不缺乏速度或精度来完成它的工作:机器人从传送带上拾取物品,并按照颜色对它们进行分类,类似于工业拾取和放置机器人。
步骤一 材料准备
硬件准备:
Arduino Mega 2560
步进电机
通用3D打印机
软件准备:
Arduino IDE
Arduino web 编辑器
Arduino microsoft visual studio代码扩展
步骤二 原理说明
与3D打印机中经常使用的简单运动学(例如线性运动学)不同,这款机器人的运动过程更复杂且不易理解。为了控制具有笛卡尔坐标的三角洲机器人,需要所谓的反向运动学。根据Robert L. Williams II发表的一篇论文,已经实现了三角机器人的逆运动学。 尽管这似乎是计算上的昂贵,但三角运动学比其他机器人运动学有一些很好的优势。首先,它们非常快速和精确,其次具有相当好的操作范围。
运动跟踪位置由激光光栅捕获。这使机器人知道物品何时通过传送带上的某个位置。此外,通过读取编码器信号来测量传送带速度。这让机器人知道物品移动的速度。鉴于该信息,可以计算机器人的运动,以便在正确的时间选择物品。
真空夹具物品由真空夹具操纵。由于我没有真空泵,我已经找到了另一种解决方案:
有两个气缸彼此相邻安装。第一个气缸连接到一个阀门,要么压入或压出。第二个圆筒连接到真空杯。当压力施加到第一气缸时,它延伸。由于两个活塞彼此机械连接,第一气缸的运动也迫使第二气缸延伸,该运动在第二气缸内产生真空。该真空用于拾取物品。
步骤三 编写程序
#include
#include
#include
#define LOW_SPEED 50
#define MEDIUM_SPEED 80
#define MAX_SPEED 100
/* Vacuum gripper 1_1
June 2019
- pressure control
- adaptive conveyor speed
July 2019
- stack
- color filter
*/
DeltaRobotKinematics delta;
StepperMotor & mot1 = *shield.getStepper(2); // pre-configured stepper
StepperMotor & mot2 = *shield.getStepper(1);
StepperMotor mot3; // half-bridge based stepper motor
DCMotor coil31;
DCMotor coil32;
DCMotor conveyor;
DCMotor gripper;
DCMotor compressor;
DCMotor laser;
DCMotor separator;
long posM1 = 0;
long posM2 = 0;
long posM3 = 0;
volatile int posConveyor = 0;
volatile int pressure;
const uint8_t limitSwitch1 = I5;
const uint8_t limitSwitch2 = I6;
const uint8_t limitSwitch3 = I8;
const uint8_t conveyorEncoder = C3;
const uint8_t photocell = C4;
const uint8_t stack = D4;
const uint8_t MPX_pin = I3;
const uint8_t colorSensor = I4;
const int whiteLowerThreshold = 100;
const int whiteUpperThreshold = 175;
const int redLowerThreshold = 196;
const int redUpperThreshold = 270;
const int blueLowerThreshold = 480;
const int blueUpperThreshold = 510;
bool pass = false;
long passTime = 0;
uint8_t currentSpeedProfile = LOW_SPEED;
void pressureControl()
{
pressure = analogRead(MPX_pin);
if (compressor.getSpeed() < 1)
{
if (pressure < 140)
{
compressor.on();
}
}
else
{
if (pressure > 187)
{
compressor.off();
}
}
}
int rad2StepM1(double radian)
{
return (int) ((radian + 0.785) * 95.51);
}
int rad2StepM2(double radian)
{
return (int) ((radian + 0.785) * 127.35);
}
int rad2StepM3(double radian)
{
return (int) ((radian + 0.785) * 127.35);
}
void posP2P(double x, double y, double z)
{
delta.inverseKinematics(x, y, z);
bool t = false;
while (!t)
{
t = mot1.stepping(posM1, rad2StepM1(delta.getPhi2()));
t &= mot2.stepping(posM2, rad2StepM2(delta.getPhi3()));
t &= mot3.stepping(posM3, rad2StepM3(delta.getPhi1()));
}
}
void posCP(double x1, double y1, double z1, double x2, double y2, double z2)
{
posP2P(x1, y1, z1);
double vect[] = {x2 - x1, y2 - y1, z2 - z1};
double vectLength = sqrt(pow(vect[0], 2) + pow(vect[1], 2) + pow(vect[2], 2));
double unitVect[3];
for (int i = 0; i < 3; i++)
{
unitVect[i] = vect[i] / vectLength / 2.0; // unitVect: Length 0.5mm
}
vect[0] = x1;
vect[1] = y1;
vect[2] = z1;
int iterations = vectLength * 2; // equivalent to vectLength / 0.5
for (int i = 0; i < iterations; i++)
{
vect[0] += unitVect[0];
vect[1] += unitVect[1];
vect[2] += unitVect[2];
posP2P(vect[0], vect[1], vect[2]);
}
posP2P(x2, y2, z2);
}
void speedProfile(int profile)
{
mot1.velocity(profile);
mot2.velocity(profile);
mot3.velocity(profile);
}
int colorDetection()
{
int n = 4; // #of measurements
long measurements[n];
for (int i = 0; i < n; i++)
{
measurements[i] = analogRead(colorSensor);
delay(30);
}
// calc average
long avg = 0;
for (int i = 0; i < n; i++)
{
avg += measurements[i];
}
avg /= n;
// calc error
long error = 0;
for (int i = 0; i < n; i++)
{
error += (avg-measurements[i])*(avg-measurements[i]);
}
Serial.print("Error: ");
error /= n;
Serial.println(error);
if (error < 3)
{
// measurement accurate, return average
Serial.println(avg);
return avg;
}
else
{
// measurement inaccurate, return 1023
return 1023;
}
}
void referencing()
{
delay(50);
bool ref = false;
while (!ref)
{
ref = mot1.referencing(posM1);
ref &= mot2.referencing(posM2);
ref &= mot3.referencing(posM3);
}
delay(50);
}
// ISR
void conveyorISR()
{
posConveyor++;
}
void setup() {
Serial.begin(115200);
Serial.println("Delta Robot @ MegaDueShield");
delta.setUpperLegsLength(75);
delta.setLowerLegsLength(180);
delta.setBaseSize(41.83);
delta.setPlatformSize(26);
coil31 = *shield.getDCMotor(5);
coil32 = *shield.getDCMotor(6);
conveyor = *shield.getDCMotor(1);
gripper = *shield.getDCMotor(7);
compressor = *shield.getDCMotor(8);
laser = *shield.getDCMotor(2);
separator = *shield.getDCMotor(4);
mot3.setHalfBridge(coil31, coil32);
mot1.motorConfig(200, 80, 600, 400);
mot2.motorConfig(200, 120, 800, 400);
mot3.motorConfig(200, 60, 800, 400);
mot1.attachLimitSwitch(limitSwitch1);
mot2.attachLimitSwitch(limitSwitch2);
mot3.attachLimitSwitch(limitSwitch3);
pinMode(photocell, INPUT_PULLUP);
pinMode(stack, INPUT_PULLUP);
pinMode(conveyorEncoder, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(conveyorEncoder), conveyorISR, CHANGE);
shield.rgb(0, 0, 150);
delay(200);
shield.rgbOff();
referencing();
delay(500);
speedProfile(80);
laser.on();
Timer1.initialize(300000);
Timer1.attachInterrupt(pressureControl);
}
void loop() {
mot1.release();
mot2.release();
mot3.release();
while (!digitalRead(stack))
{
// no item in stock
if (!pass)
{
conveyor.off();
}
else
{
if ((millis() - passTime) > 2000)
{
// conveyor on until white item has passed
pass = false;
}
}
delay(300);
}
pass = false;
conveyor.cw(135);
delay(400);
int colorVal = 1023;
while (colorVal > 1000)
{
colorVal= colorDetection();
}
// separate
separator.on();
delay(80);
separator.off();
if (colorVal < whiteUpperThreshold)
{
// color is white
delay(300);
pass = true;
passTime = millis();
}
else
{
// color is either red or blue, remove item from conveyor
delay(20); // wait to prevent light barrier from triggering falsely
while (!digitalRead(photocell))
{
}
posConveyor = 0;
long t0 = millis();
while (posConveyor < 140)
{}
long t1 = millis();
double xTrig = 285.0 - 37940.0 / (t1 - t0);
while (posConveyor < xTrig)
{
}
long t = millis();
posP2P(-18, 10, -165);
long t2 = millis();
//delay(4000);
//posCP(-21, 10, -167, -21, 10, -176);
posP2P(-18, 10, -176);
long t3 = millis();
gripper.on();
delay(200);
// choose where to place the item based on color
if (colorVal < blueLowerThreshold)
{
// color is red
posP2P(0, 0, -160);
posP2P(60, 0, -160);
}
else
{
// color is blue
posP2P(-20, 30, -160);
posP2P(-70, -20, -160);
}
gripper.off();
delay(300);
posP2P(0, 0, -140);
referencing();
}
}
步骤四 验证结果
最终我们出色的完成了我们的作品,在这里我们可以看到机器人可以成功的分拣物体了。


