

释放双眼,带上耳机,听听看~!
简介
万圣节快到了!我们决定打造一些很棒的东西。我们决定搭建一个机器人,他们可以跟随您的脸,并且知道您何时微笑然后与您一起笑!
该项目是使用iRobbie App的另一个示例,该应用程序将iPhone转换为Arduino项目的强大工具箱。
该应用程序能够捕获和处理视频,然后通过HM-10蓝牙模块将X和Y坐标以及微笑状态发送给Arduino。
步骤一 材料准备
硬件准备:
arduino uno
HM-10蓝牙模块
带有伺服电机的云台模块
面包板
红色LED
软件准备:
arduino IDE
iRobbie App
步骤二 原理说明
我们利用iRobbie,和arduino通过蓝牙进行交流,将客户端采集到的信息用来控制。
步骤三 电路搭建
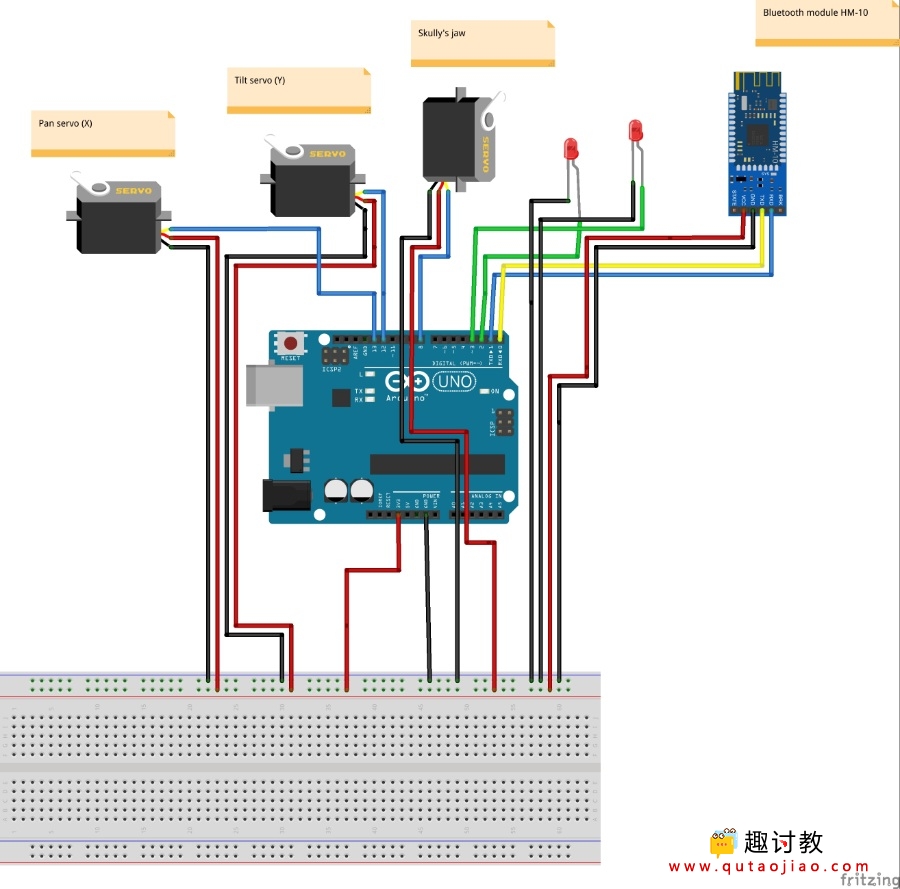
根据原理图搭建我们的ghost机器人,机器人的搭建是一个技术活,可以根据我们自己的想法发挥创意进行创作,这里提供我的作品仅供参考

步骤四 编写程序
#include "servo.h"
Servo servox;
Servo servoy;
Servo servoz;
int angle = 0;
boolean forward1 = false ;
String bluetoothRead, Str_x, Str_y, Str_p, Str_s;
int x ;
int y ;
int x1 ;
int y1 ;
int points;
int length;
const int buzzer = 10;
int s;
int led1 = 3; // the pin that the LED1 is attached to
int led2 = 2; // the pin that the LED2 is attached to
int brightness = 0; // how bright the LED is
int fadeAmount = 1; // how many points to fade the LED by
const long interval = 1000; // interval at which to blink (milliseconds
const long interval_short = 100;
int ledState = LOW; // ledState used to set the LED
unsigned long previousMillis = 0; // will store last time LED was updated
#define ENA 11
#define ENB 6
#define IN1 5
#define IN2 7
#define IN3 8
#define IN4 9
#define DELAY 20
void setup() {
Serial.begin(9600);
Serial.flush();
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
servox.attach(13);
servoy.attach(12);
servoz.attach(8);
servox.write(90);
servoy.write(90);
servoz.write(90);
}
void loop() {
int i=0;
char commandbuffer[200];
if(Serial.available()){
delay(15);
while( Serial.available() && i< 199) {
commandbuffer[i++] = Serial.read();
}
commandbuffer[i++]=' ';
bluetoothRead = (char*)commandbuffer;
length = bluetoothRead.length();
Serial.println(bluetoothRead);
if(bluetoothRead.substring(0, 1).equals("x")){
int i=1;
while(bluetoothRead.substring(i, i+1) != ("y")){
i++;
}
Str_x = bluetoothRead.substring(1, i);
x = Str_x.toInt();
Str_y = bluetoothRead.substring(i+1, length - 2);
y = Str_y.toInt();
Str_p = bluetoothRead.substring(length - 2, length - 1);
points = Str_p.toInt();
Str_s = bluetoothRead.substring(length - 1, length);
s = Str_s.toInt();
i = 1;
Serial.println(x);
Serial.println(y);
Serial.println(points);
Serial.println(s);
Serial.println(length );
}
}
servomove();
if (x1 != 0 && y1 != 0) {
ledblink();
if (s == 1) {
ledlaugh();
servomouth();
Serial.println("Smile!");
}
}
else{
ledState = LOW;
Serial.println("NotSmile");
digitalWrite(led1, ledState);
digitalWrite(led2, ledState);
}
}
void servomove(){
x1 = x/3;
y1 = y/4;
if (points == 4) {
servox.write(90-x1);
servoy.write(90-y1);
delay(10);
}
if (points == 3)
{
servox.write(90+x1);
servoy.write(90-y1);
delay(10);
}
if (points == 7)
{
servox.write(90+x1);
servoy.write(y1+90);
delay(10);
}
if (points == 8)
{
servox.write(90-x1);
servoy.write(y1+90);
delay(10);
}
if (x1 == 0 && y1 == 0)
{
servox.write(90);
servoy.write(90);
delay(10);
}
}
void ledblink(){
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
// set the LED with the ledState of the variable:
digitalWrite(led1, ledState);
digitalWrite(led2, ledState);
}
}
void ledlaugh(){
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval_short) {
// save the last time you blinked the LED
previousMillis = currentMillis;
// if the LED is off turn it on and vice-versa:
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
// set the LED with the ledState of the variable:
digitalWrite(led1, ledState);
digitalWrite(led2, ledState);
}
}
void servomouth(){
unsigned long currentMillis = millis();
if (millis() - previousMillis >= DELAY)
{
previousMillis += DELAY;
if (forward1)
{
servoz.write(-- angle);
if(angle == 100)
forward1 = false;
}
else
{
servoz.write(++ angle);
if (angle == 140)
forward1 = true;
}
}
}
步骤五 验证结果
参考我的code然后进行二次开发,制造属于你的ghost机器人吧
源码
提取码:无
解压码:无


