

释放双眼,带上耳机,听听看~!


前面的课程教了大家怎么用光敏电阻控制舵机,现在这节课,大家将能学会怎么用使用电位器来控制舵机。
那么,我们现在开始吧!
第一步 准备材料
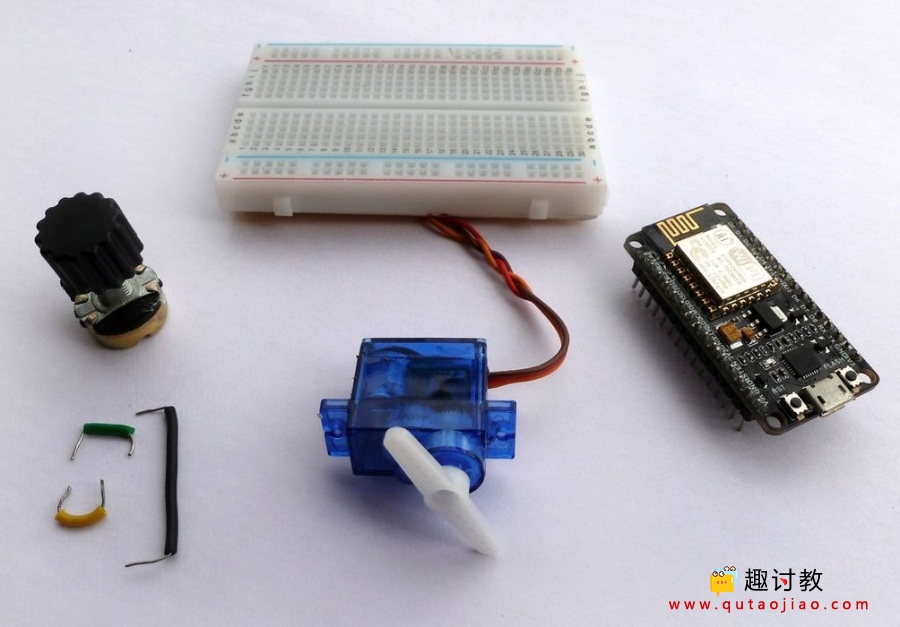
硬件清单:
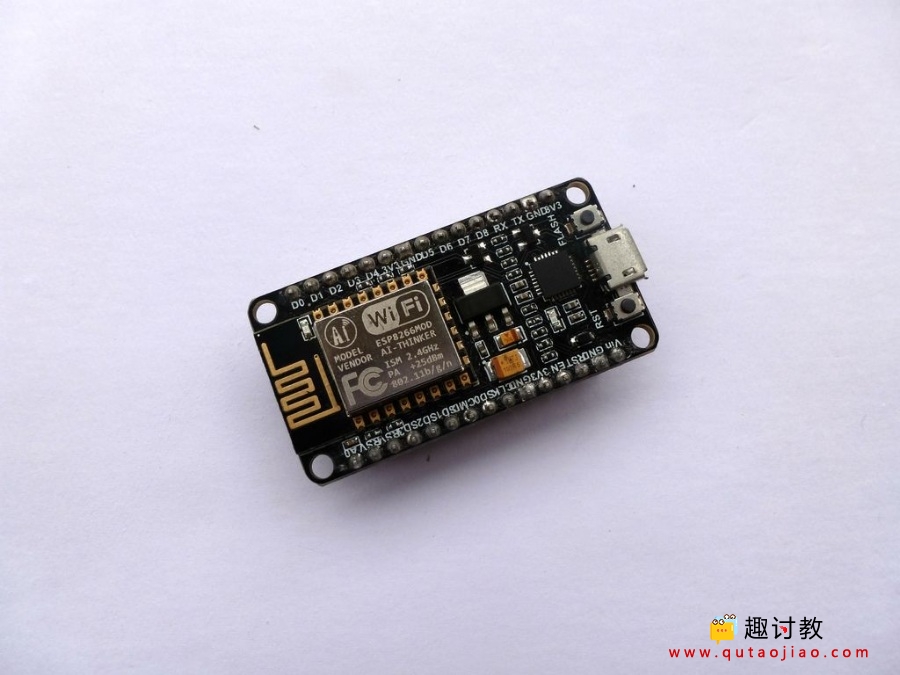
- NodeMCU
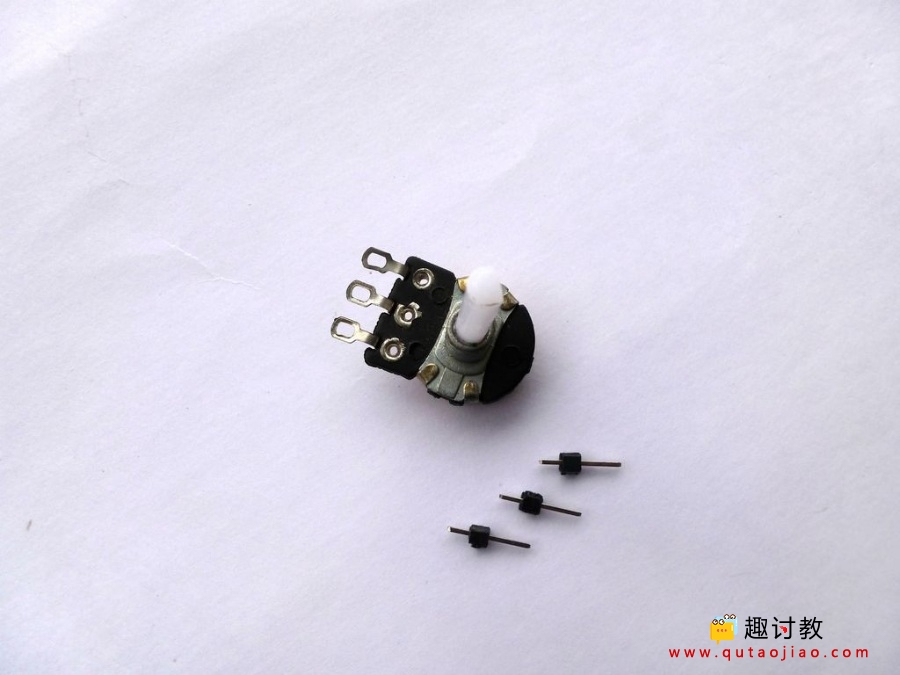
- 10K电位器
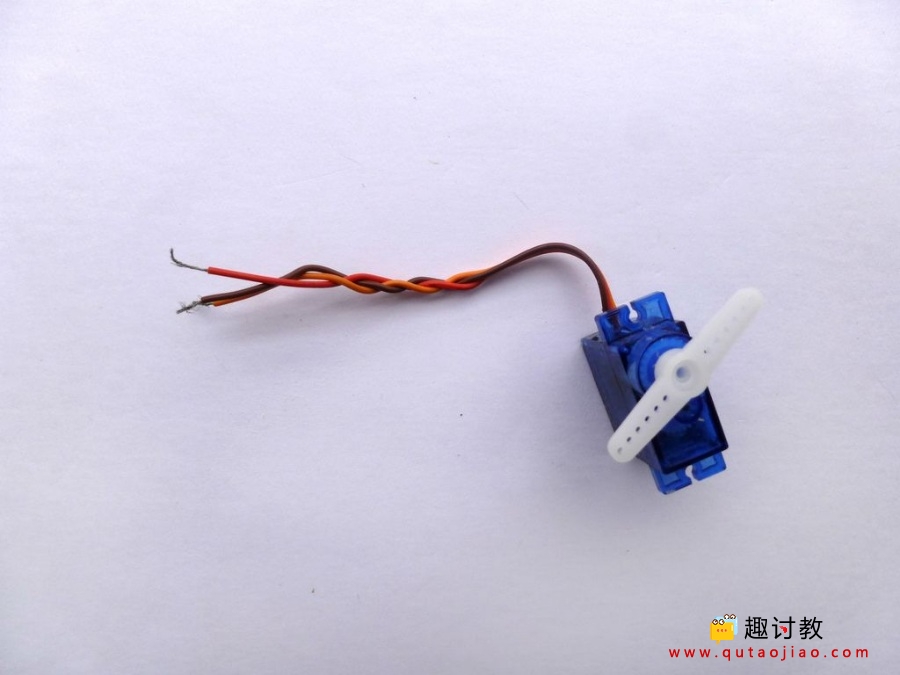
- 舵机
- 面包板
- USB数据线
- 连接线或杜邦线
第二步 原理说明




关于电位器
电位器是一个三端电阻,带有滑动或旋转触点,形成可调电压分压器。
电位器通常用于控制电子设备,例如音频设备上的音量控制。
由机构操作的电位器可用作位置传感器,例如:在操纵杆中
通常,电位器被称为可变电阻器,当转动/调节旋转触点时,它会改变其电阻值(欧姆)。
因此,在这个项目中,我们可以通过转动电位器改变电阻值,从而改变舵机的角度,这与上节课的光敏电阻控制舵机类似。
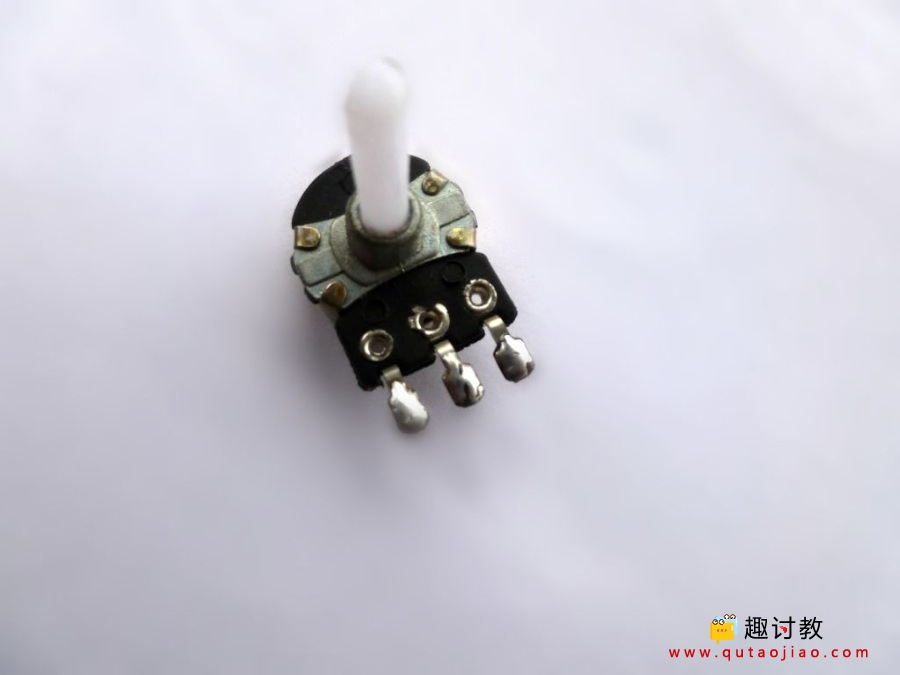
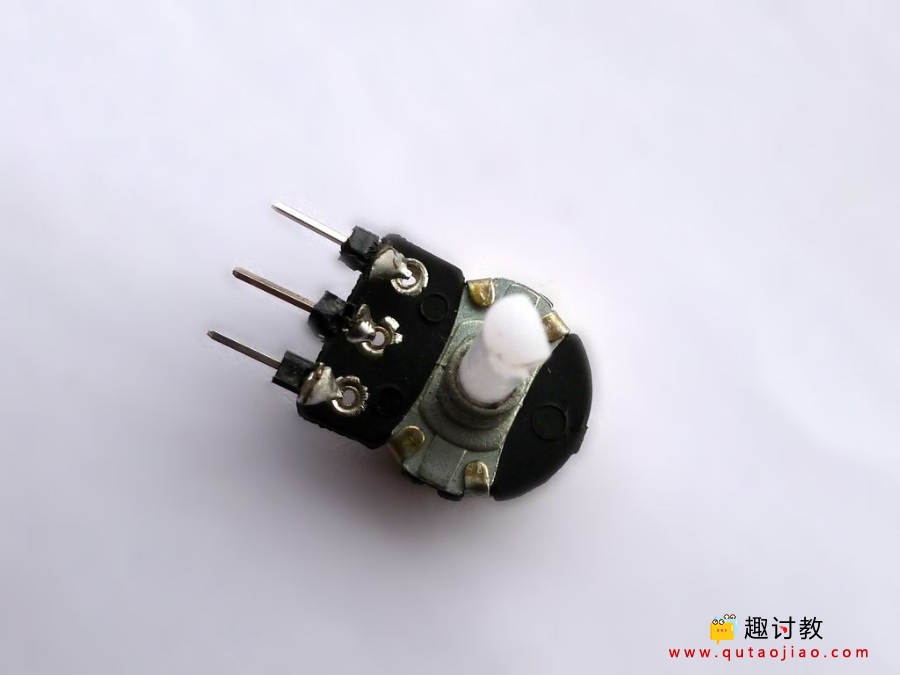
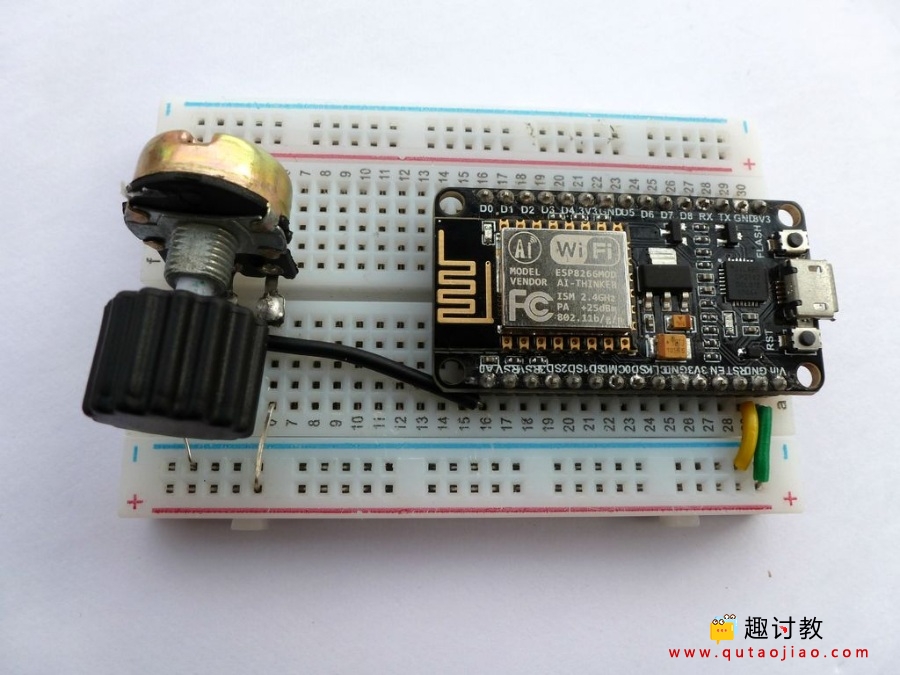
第三步 电位器焊接



第四步 电路搭建
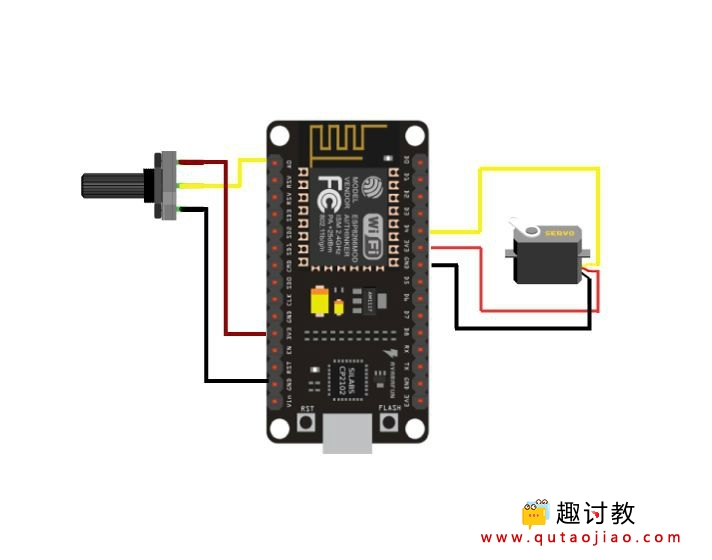




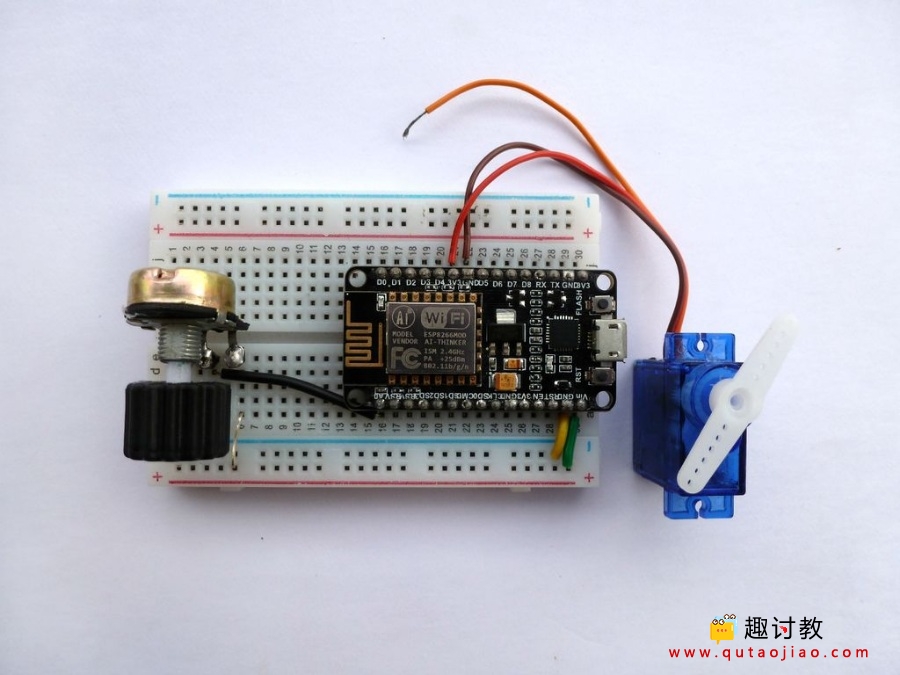
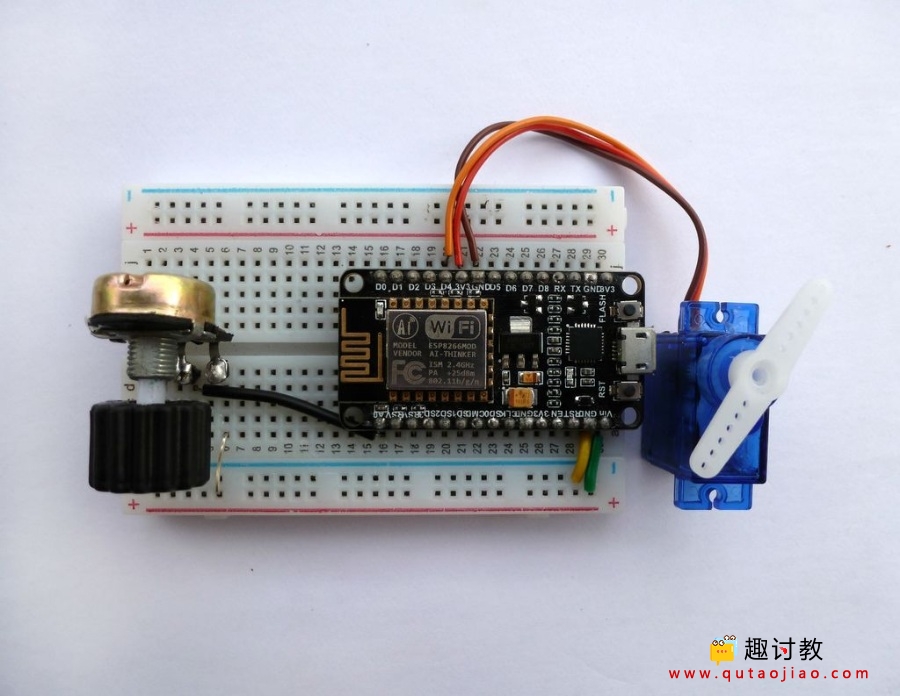
舵机连接:
橙色线连接到数字引脚D4。
棕色线连接到GND 引脚。
红线连接到3v3引脚。
电位器连接:(查看上面图片步骤)
第一个引脚连接到3v3引脚。
第二个引脚连接到模拟输入A0。
第三个引脚连接到GND引脚。
第五步 开始编程
在这个项目中,需要使用到舵机驱动的库。
库文件名为server.h.
如果没有安装这个库文件,可点击下面的链接进行下载:
/*
作者:趣讨教(www.qutaojiao.com)
时间:2018 - 10 - 5
描述:通过电位器控制舵机的角度
引脚连接:
舵机——D4
电位器——A0
*/
#include //添加舵机控制库文件
Servo servo; // 创建舵机对象
int pot = 0; // 模拟A0引脚用于连接电位器
int temp; // 变量存放读取模拟引脚的值
void setup() {
Serial.begin(9600); // 开始串行通信
servo.attach(2); //D4
servo.write(0);
}
余下程序:
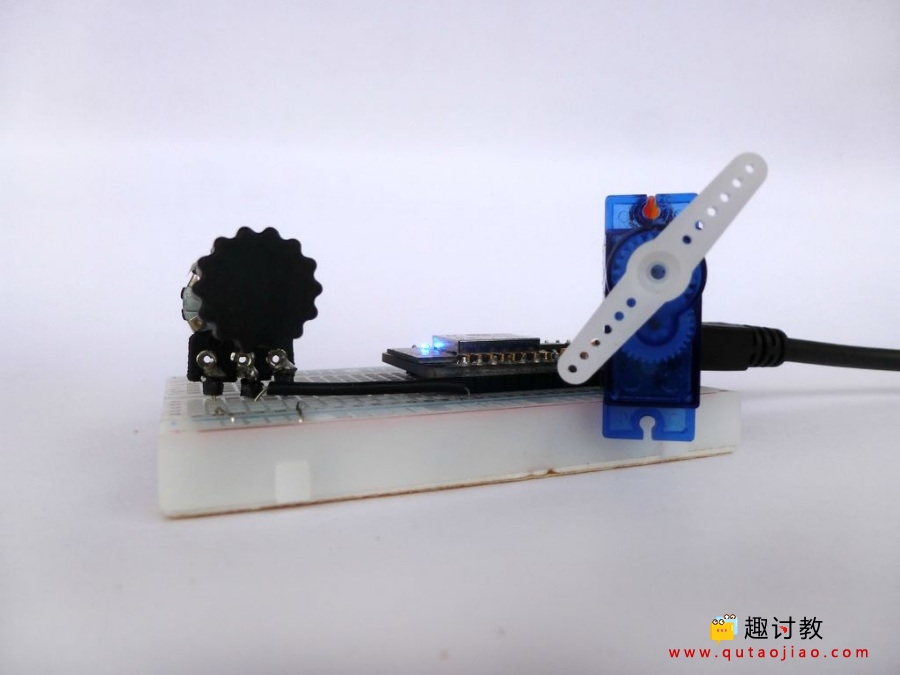
第六步 效果演示

当旋转电位器的时候,舵机的角度会随着旋转的角度而进行改变。
这个项目相对来说比较简单!


