
释放双眼,带上耳机,听听看~!
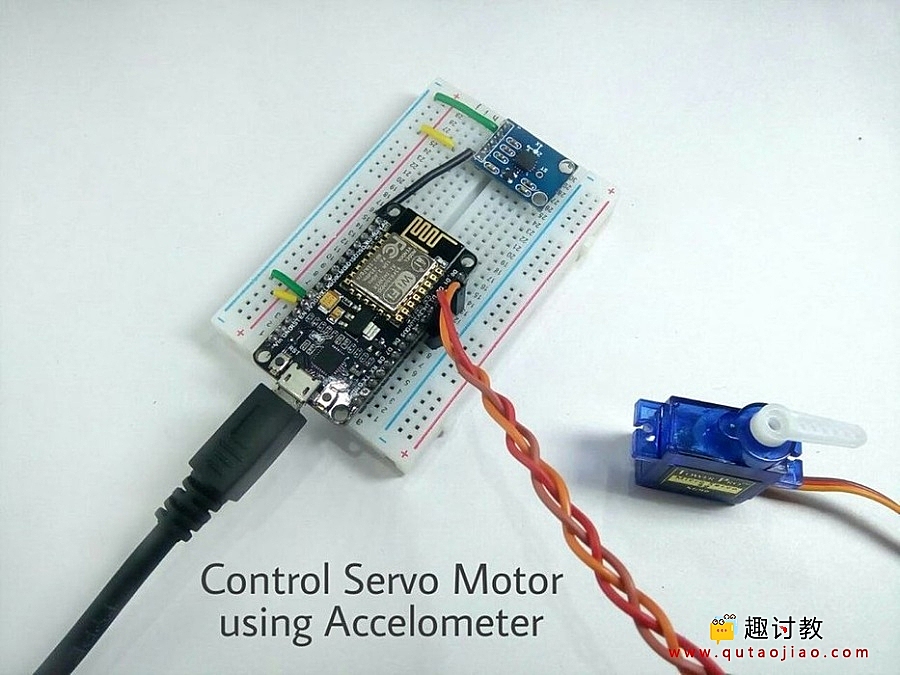
在前面的课程中,学习了如何使用舵机,如何使用加速度计,这节课,将会把两个东西结合起来。
使用加速度传感器,从而控制舵机的角度。那么,我们开始吧!
第一步 准备材料

硬件清单:
- ADXL335:加速计传感器
- NodeMCU开发板
- 舵机
- 连接线(可选)
- 面包板
- 跳线或杜邦线
- USB数据线
第二步 原理说明






舵机是可以转向指定位置的设备。
通常,它们有一个可以转到最大180度。使用NodeMCU,我们控制舵机转到指定位置。就是如此容易!
ADXL335是3v加速度传感器。每个轴有三个输出,即X,Y和Z,这些是模拟输出。
在我之前的课程中,你应该学会了如何连接舵机,然后如何将其转到不同的位置以及如何连接加速度传感器。
第三步 电路搭建
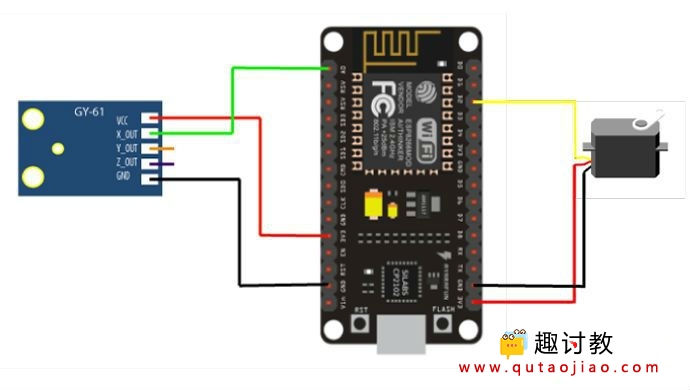
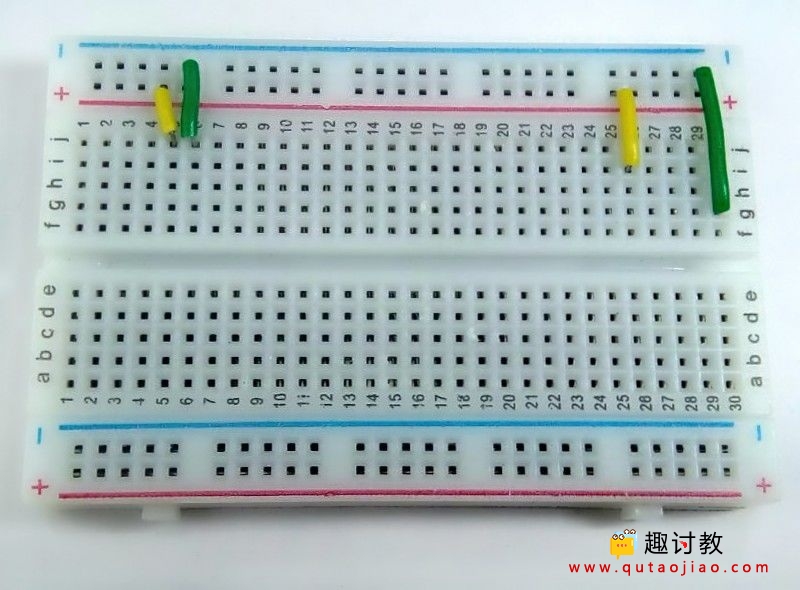
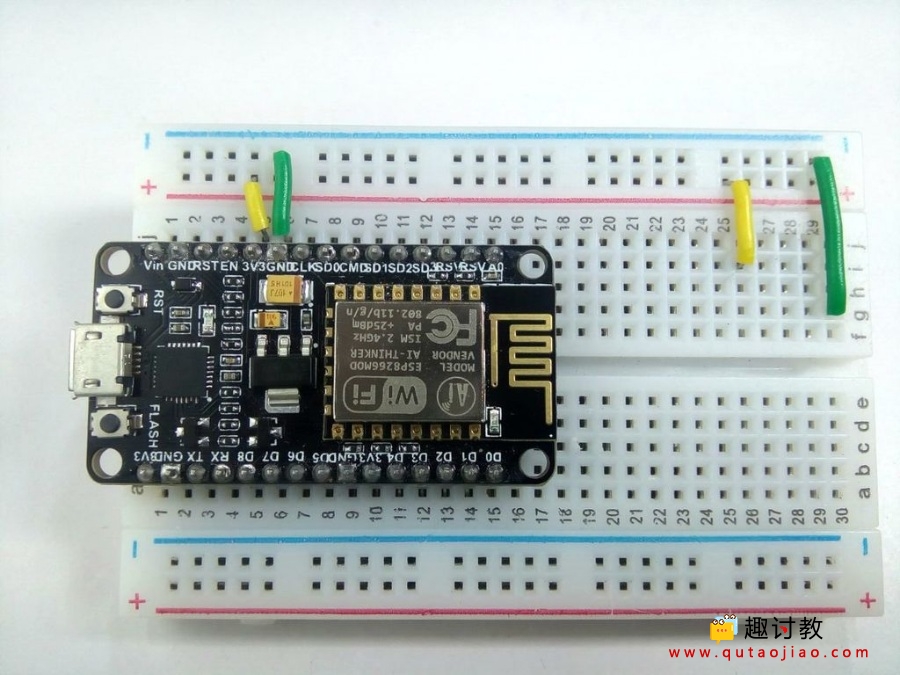


舵机与nodemcu的连接:
橙色线连接到数字引脚D2。
棕色线连接到GND引脚。
红色线连接到3v3引脚。
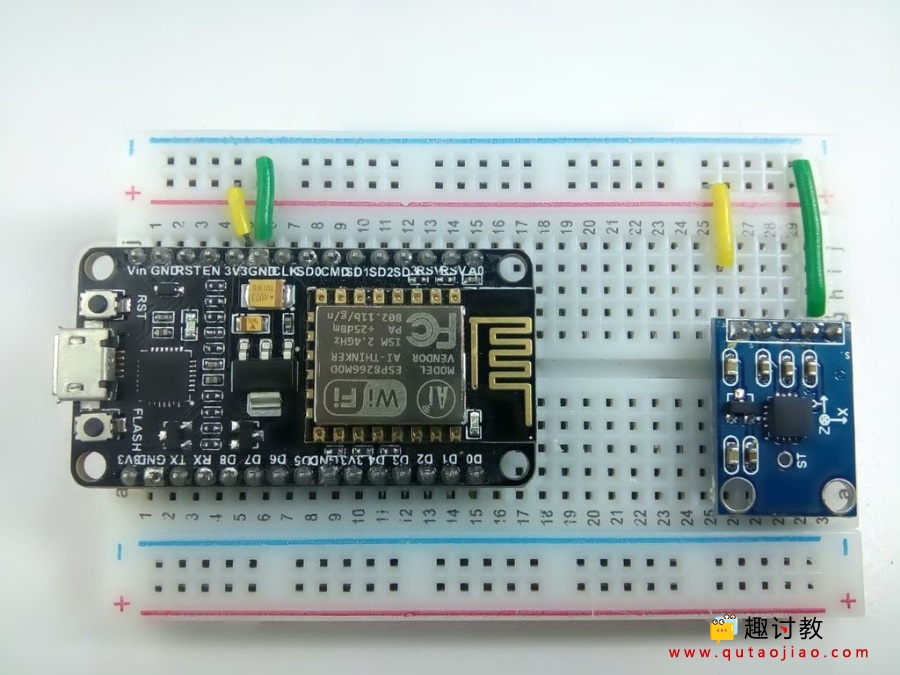
加速度传感器与nodemcu的连接
VCC – 连接到NodeMCU + 3.3v。
X – 连接到模拟引脚A0。
GND – 连接到接地引脚(GND)。
第四步 开始编程
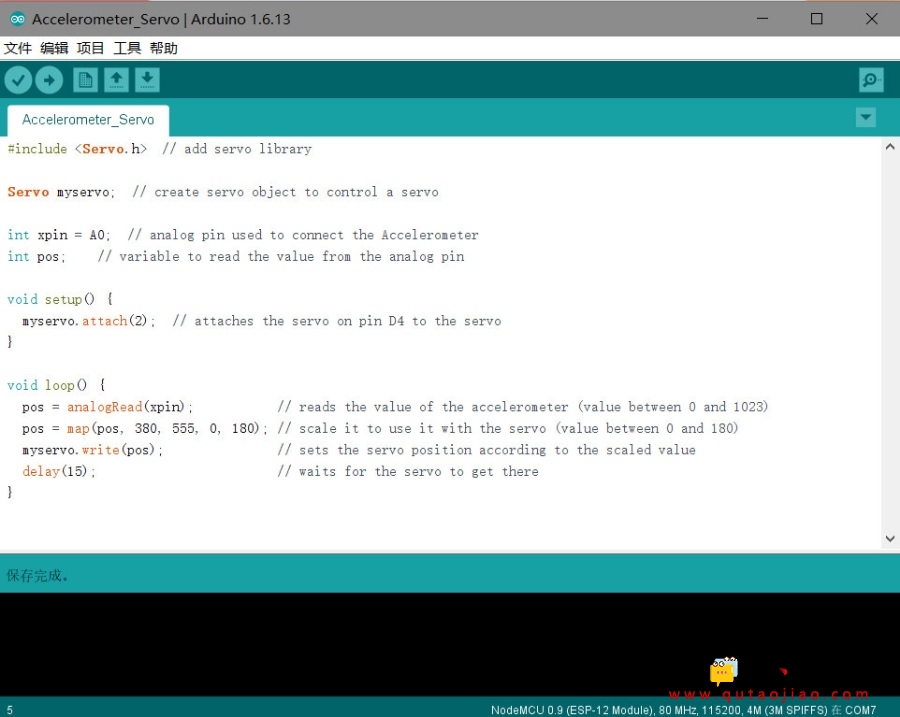
程序:
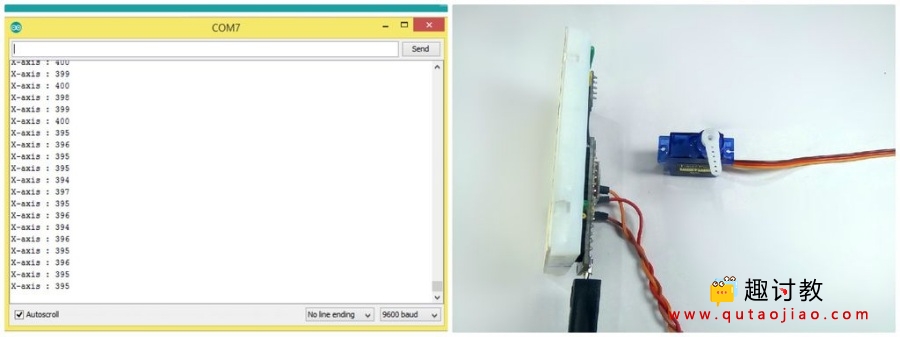
第五步 效果演示