
释放双眼,带上耳机,听听看~!
简介
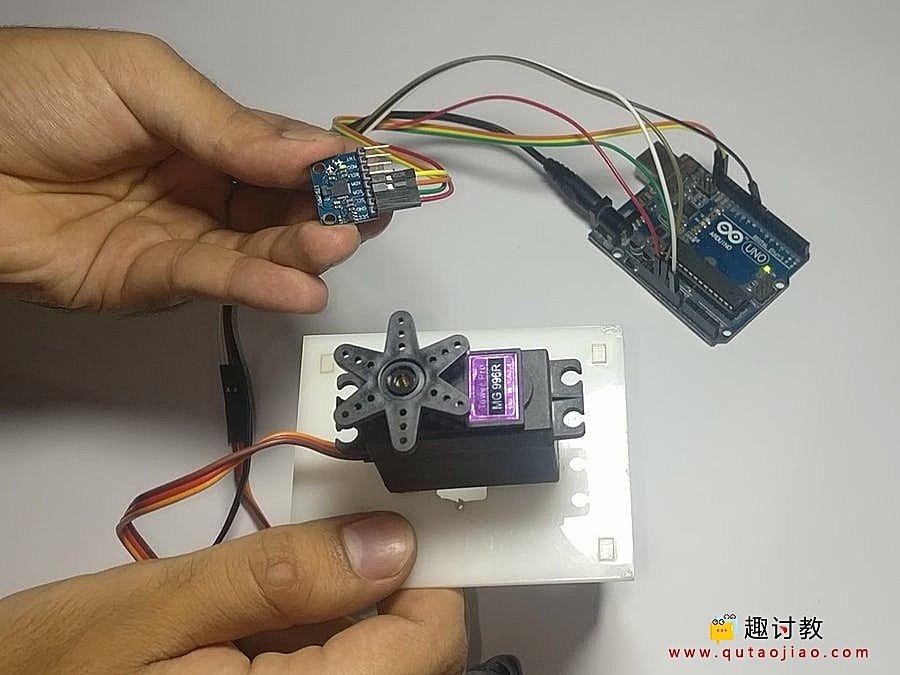
MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。由于其体积小巧,功能强大,精度较高,不仅被广泛应用于工业,同时也是航模爱好者的神器,被安装在各类飞行器上驰骋蓝天。如果我们可以掌握这款工具,我们的想法可以更好的实现。
步骤一 材料准备
硬件准备:
arduino uno或 genuino uno
MPU6050
SG90伺服电机
软件准备:
arduino IDE
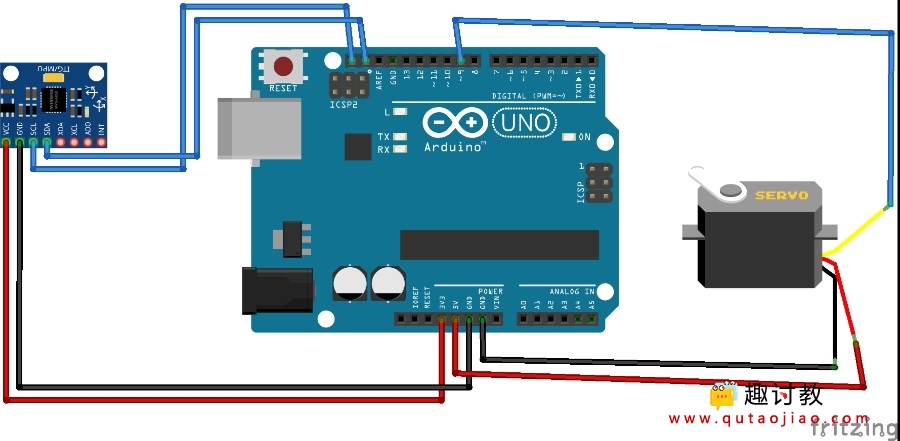
步骤二 电路搭建
电路根据下图进行连接。
步骤四 编写程序
程序的执行需要MPU6050的库,库从附件进行下载
#include //library for GYRO
#include
#include
Servo myservo; // create servo object to control a servo
int X = 0;
int Y = 0;
GY6050 gyro(0x68); //to save GYRO data
void setup() {
Wire.begin(); //initializing GYRO
gyro.initialisation();
delay(100);
myservo.attach(9);
}
void loop() {
X = map(gyro.refresh('A', 'X'), -90, 90, 0, 180); //mapping the gyro data according to angle limitation of servo motor
Y = map(gyro.refresh('A', 'Y'), -90, 90, 0, 180);
myservo.write(Y); //movement of Y axis will control servo
delay(15);
}
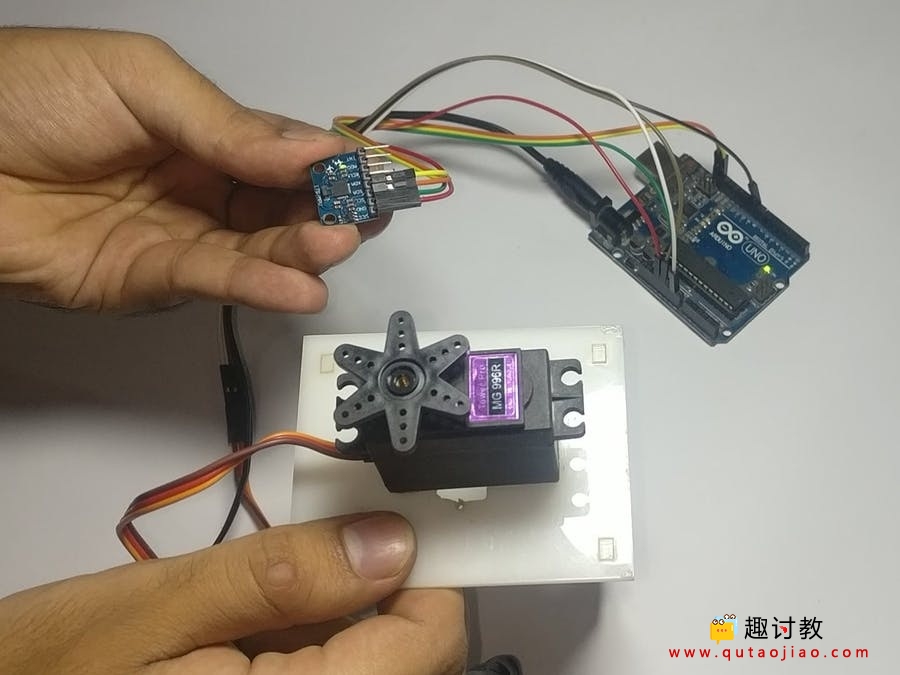
步骤五 验证结果
最终在连接正确的前提下,可以通过对MPU6050做不同的倾斜控制舵机做不同的旋转反应



这个都需要什么库啊,上面的代码也没说清楚