


释放双眼,带上耳机,听听看~!
介绍
- MPU6050传感器模块是一个集成的6轴运动跟踪设备。
- 它有一个3轴陀螺仪,3轴加速度计,数字运动处理器和温度传感器,所有这些都集成在一个IC中。
- 它可以使用其辅助I2C总线接受来自其他传感器的输入,如3轴磁力计或压力传感器。
- 如果连接外部3轴磁力计,它可以提供完整的9轴运动融合输出。
- 微控制器可以使用I2C通信协议与该模块通信。通过使用I2C通信从某些寄存器的地址读取值,可以找到各种参数。
- 沿X,Y和Z轴读取的陀螺仪和加速度计有2种补码形式。
- 陀螺仪读数以度/秒(dps)为单位; 加速度计读数以g为单位。
要使用Raspberry Pi连接MPU6050,我们应该确保Raspberry Pi上的I2C协议已打开。因此,在使用树莓派连接MPU6050之前,我们需要在Raspberry Pi上进行一些I2C配置,您可以参考本教程基础部分的I2C设置教程。
在Raspberry Pi上配置I2C后,让我们将Raspberry Pi与MPU6050连接起来。
电路连接图
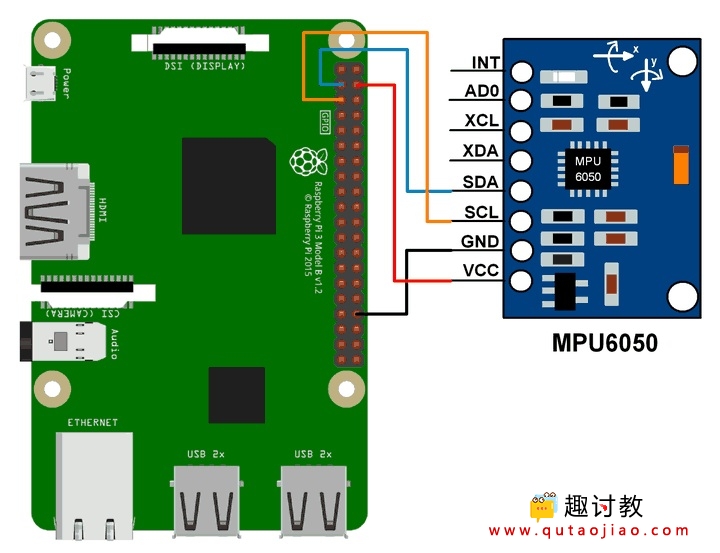
MPU6050与Raspberry Pi连接
例
在这里,我们将使用Raspberry Pi连接MPU6050模块,以读取陀螺仪和加速度计值并打印它们。
我们可以使用Python和C语言将MPU6050模块与Raspberry Pi连接起来。我们将在终端上显示从MPU6050模块读取的加速度计和陀螺仪的值。
对于Raspberry Pi上经常使用的基于Python的I2C函数,您可以为Raspberry Pi引用基于Python的I2C函数。
Python程序
'''
Read Gyro and Accelerometer by Interfacing Raspberry Pi with MPU6050 using Python
https://www.qutaojiao.com
'''
import smbus #import SMBus module of I2C
from time import sleep #import
#some MPU6050 Registers and their Address
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
def MPU_Init():
#write to sample rate register
bus.write_byte_data(Device_Address, SMPLRT_DIV, 7)
#Write to power management register
bus.write_byte_data(Device_Address, PWR_MGMT_1, 1)
#Write to Configuration register
bus.write_byte_data(Device_Address, CONFIG, 0)
#Write to Gyro configuration register
bus.write_byte_data(Device_Address, GYRO_CONFIG, 24)
#Write to interrupt enable register
bus.write_byte_data(Device_Address, INT_ENABLE, 1)
def read_raw_data(addr):
#Accelero and Gyro value are 16-bit
high = bus.read_byte_data(Device_Address, addr)
low = bus.read_byte_data(Device_Address, addr+1)#concatenate higher and lower value
value = ((high << 8) | low)#to get signed value from mpu6050if(value > 32768):
value = value - 65536return value
bus = smbus.SMBus(1) # or bus = smbus.SMBus(0) for older version boards
Device_Address = 0x68 # MPU6050 device address
MPU_Init()
print (" Reading Data of Gyroscope and Accelerometer")
while True:
#Read Accelerometer raw value
acc_x = read_raw_data(ACCEL_XOUT_H)
acc_y = read_raw_data(ACCEL_YOUT_H)
acc_z = read_raw_data(ACCEL_ZOUT_H)
#Read Gyroscope raw value
gyro_x = read_raw_data(GYRO_XOUT_H)
gyro_y = read_raw_data(GYRO_YOUT_H)
gyro_z = read_raw_data(GYRO_ZOUT_H)
#Full scale range +/- 250 degree/C as per sensitivity scale factor
Ax = acc_x/16384.0
Ay = acc_y/16384.0
Az = acc_z/16384.0
Gx = gyro_x/131.0
Gy = gyro_y/131.0
Gz = gyro_z/131.0
余下程序(直接拼接到上面程序下面即可):
C程序
在这里,我们使用WiringPi C库从MPU6050模块读取数据。
/*
MPU6050 Interfacing with Raspberry Pi
https://www.qutaojiao.com
*/
#include
#include
#include
#include
#define Device_Address 0x68 /*Device Address/Identifier for MPU6050*/
#define PWR_MGMT_1 0x6B
#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define INT_ENABLE 0x38
#define ACCEL_XOUT_H 0x3B
#define ACCEL_YOUT_H 0x3D
#define ACCEL_ZOUT_H 0x3F
#define GYRO_XOUT_H 0x43
#define GYRO_YOUT_H 0x45
#define GYRO_ZOUT_H 0x47
int fd;
void MPU6050_Init(){
wiringPiI2CWriteReg8 (fd, SMPLRT_DIV, 0x07); /* Write to sample rate register */
wiringPiI2CWriteReg8 (fd, PWR_MGMT_1, 0x01); /* Write to power management register */
wiringPiI2CWriteReg8 (fd, CONFIG, 0); /* Write to Configuration register */
wiringPiI2CWriteReg8 (fd, GYRO_CONFIG, 24); /* Write to Gyro Configuration register */
wiringPiI2CWriteReg8 (fd, INT_ENABLE, 0x01); /*Write to interrupt enable register */
}
short read_raw_data(int addr){
short high_byte,low_byte,value;
high_byte = wiringPiI2CReadReg8(fd, addr);
low_byte = wiringPiI2CReadReg8(fd, addr+1);
value = (high_byte << 8) | low_byte;
return value;
}
void ms_delay(int val){
int i,j;
for(i=0;i<=val;i++)
for(j=0;j<1200;j++);
}
int main(){
float Acc_x,Acc_y,Acc_z;
float Gyro_x,Gyro_y,Gyro_z;
float Ax=0, Ay=0, Az=0;
float Gx=0, Gy=0, Gz=0;
fd = wiringPiI2CSetup(Device_Address); /*Initializes I2C with device Address*/
MPU6050_Init(); /* Initializes MPU6050 */
while(1)
{
/*Read raw value of Accelerometer and gyroscope from MPU6050*/
Acc_x = read_raw_data(ACCEL_XOUT_H);
Acc_y = read_raw_data(ACCEL_YOUT_H);
Acc_z = read_raw_data(ACCEL_ZOUT_H);
Gyro_x = read_raw_data(GYRO_XOUT_H);
Gyro_y = read_raw_data(GYRO_YOUT_H);
Gyro_z = read_raw_data(GYRO_ZOUT_H);
/* Divide raw value by sensitivity scale factor */
Ax = Acc_x/16384.0;
Ay = Acc_y/16384.0;
Az = Acc_z/16384.0;
余下程序(直接拼接到上面程序下面即可):
MPU6050输出
输出窗口将显示下面提到的所有值
Gx =陀螺X轴数据,单位为度/秒
Gy =陀螺仪Y轴数据,单位为度/秒
Gz =陀螺Z轴数据,单位为度/秒
Ax =加速度计X轴数据,单位为g
Ay =加速度计Y轴数据,单位为g
Az =加速度计Z轴数据,单位为g
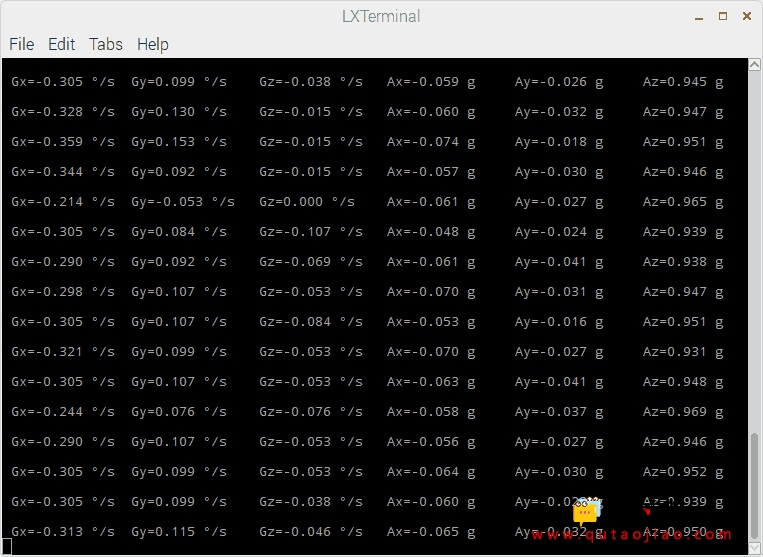
MPU6050数据的输出窗口



感谢楼主 正在研究mpu6050相关的
感谢分享