


释放双眼,带上耳机,听听看~!
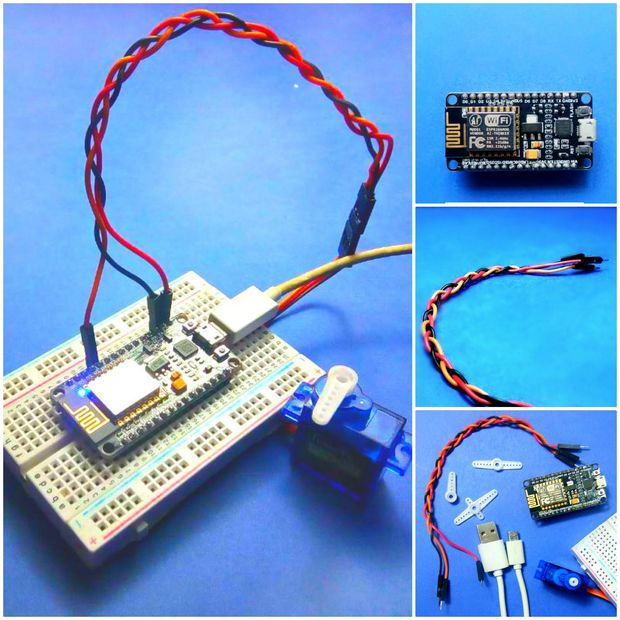
这节课内容,你将学会如何通过nodemcu来控制舵机。
步骤1:材料准备
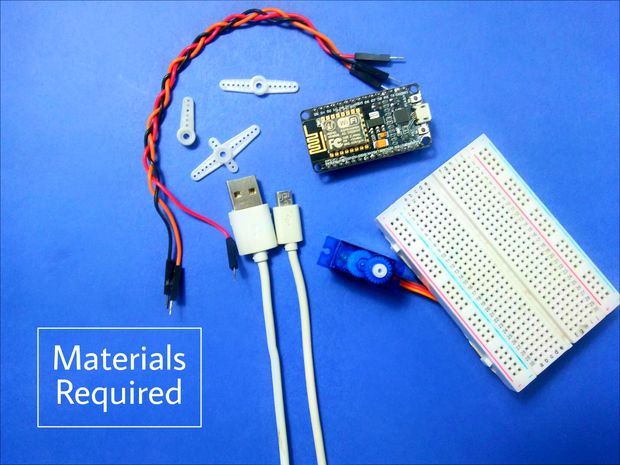
上图是这节课所需要用到的材料。
硬件材料
NodeMCU
伺服电机
面包板
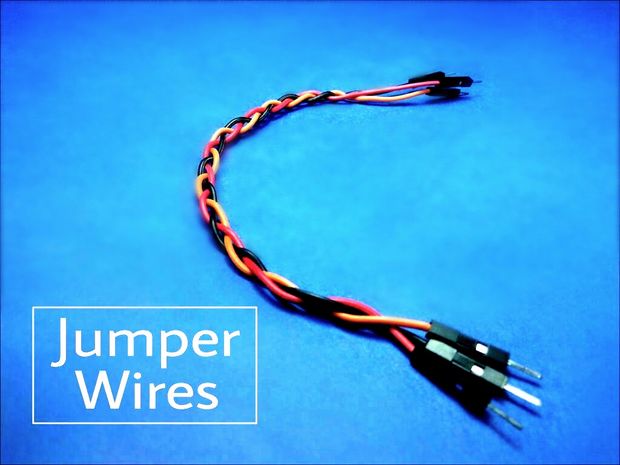
跳线
*微型USB电缆
软件环境
*Arduino IDE(配置好了esp8266环境)
步骤2:硬件说明
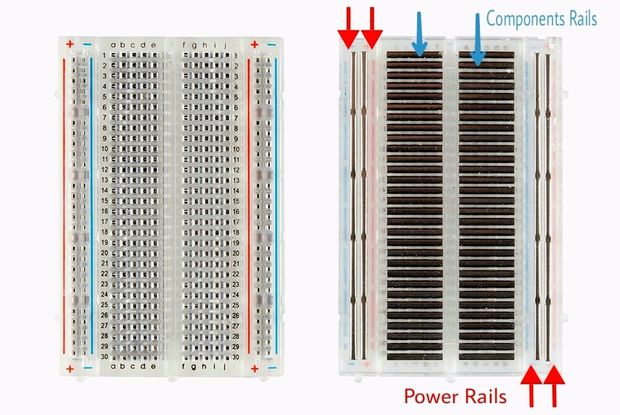

什么是面包板?
它是一个转接平台,您可以在其中插入组件并轻松移除它们。请参考照片看看它是如何制作的。每侧通常有2个带,表示电源通道。它将所有的( – )和(+)连接在一起。
什么是舵机(伺服电机)?
舵机是可以转到指定角度的装置。
通常他们有一个可以转180度的伺服臂。使用NodeMCU,我们可以控制舵机到达指定的位置。
连接到舵机
有两种常见的舵机类型:
白色 – 红色 – 黑色线舵机
橙色 – 红色 – 棕色线舵机
如果您的伺服有白色 – 红色 – 黑色电线连接,连接方式如下:
白线连接数字引脚D4
黑线连接到GND引脚
红线连接到3V3引脚
如果您的伺服器有橙 – 红 – 棕线,请按如下方式连接:
橙线连接数字引脚D4
棕色线连接到GND引脚
红线连接到3V3引脚
在开始编程之前,需要看看有没有servo.h库,如果没有的话,那就需要下载库了
库下载方式如下:
打开Arduino IDE,然后转到项目> 加载库 > 管理库 > 搜索 servo,然后安装就好了。

安装完毕后,就可以开始愉快的编程啦,代码如下,大家参考下,不想自己写的可以直接到最后面下在本课程代码,但是不推荐。
步骤3:开始编程

本节课程代码:
程序编好之后,就把它上传到开发板!
步骤4:运行结果
运行结果图略,自行编译上传后查看,最终结果是这样的:
+刚开始旋转90°
+1秒钟后
+转回到原点
+1秒钟以后
+重新执行第一步,反复如此
本节课程序下载:



第一行应该是
#include “Servo.h”
系统自动过滤掉了头文件,感谢补充!!!