

本次课程,我们将介绍L298N双H桥电机驱动模块如何与NodeMCU进行连接使用。
步骤1:材料准备
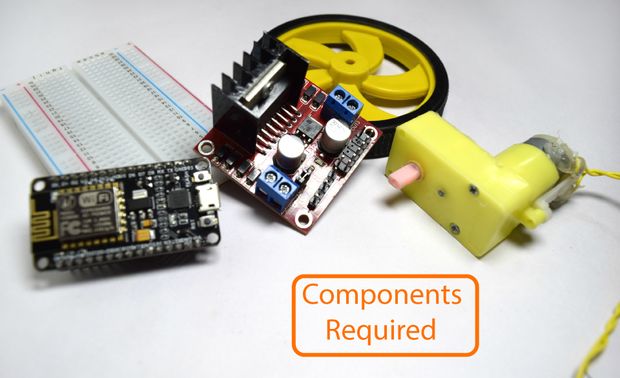

硬件要求
L298N双H桥电机驱动模块
NodeMCU开发板
杜邦线
直流电源(7-35v)
*直流电机
软件要求
*Arduino IDE
步骤2:硬件描述
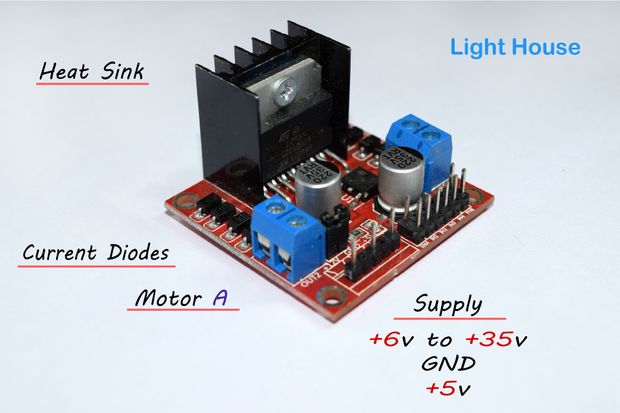
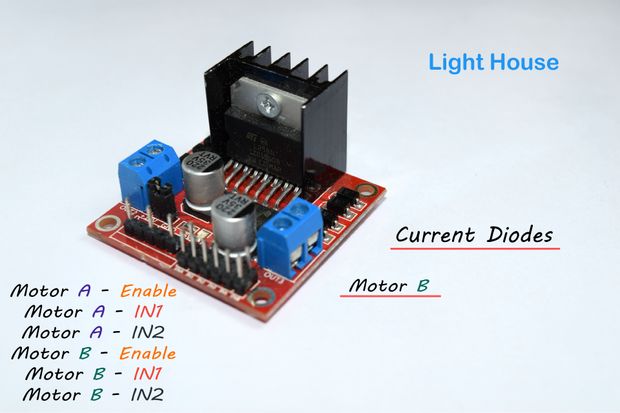
先来了解L298N双H桥电机控制器模块
H桥电机控制器可以驱动电流在任一极性,并控制电路的Pulse Width Modulation(PWM)。
什么是脉宽调制?
脉宽调制技术,全称为脉冲宽度调制,英文名称为Pulse Width Modulation,简写为PWM,是一种利用微处理器来完成对模拟电路控制的一种技术,其具有操作简单、灵活性好、反应速度快等诸多特点,现已在通信、测量、功率变换、功率控制等多个方面都得到了广泛的应用。如果通过PWM控制电机,电机将持续更长时间,更可靠。
产品规格:
双H桥驱动芯片:L298N
逻辑电压:5V
驱动电压:5V-35V
逻辑电流:0-36mA
驱动电流:2A(MAX单桥)
最大功率:25W
注:内置5v电源,驱动电压为7v-35v。但建议您不要使用板载5v电源为nodemcu开发板供电。
步骤3:电路图分析
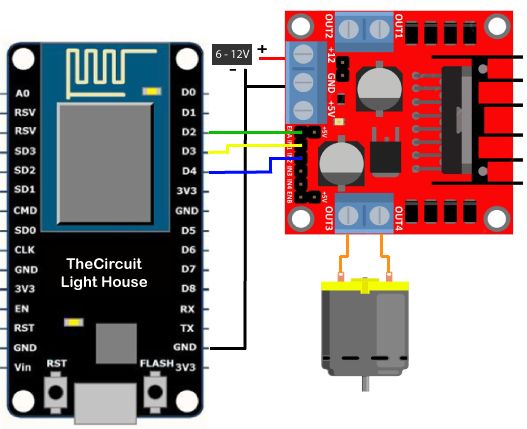
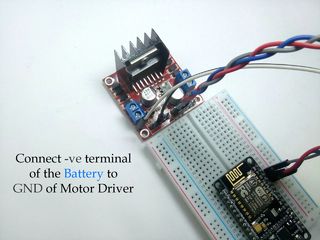
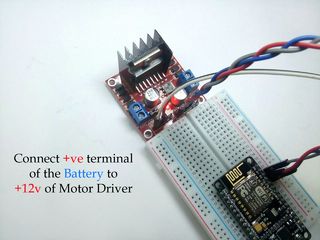
硬件连接:
- 12v – 连接的电池正极。
GND – 连接的电池的接地端。
- 5v – + 5v输入
输入连接:
(电机A)
ENA – 为电机A启用PWM信号
IN1 – 启用电机A
IN2 – 启用电机A
(电机B)
ENB – 为电机B启用PWM信号
IN3:启用电机B
IN4:启用电机B
注意:
确保你的硬件连接没有问题在开始下一步编程。(NodeMCU,电源和电机驱动器)
该PWM引脚不是必须要的,如果你不想用来控制输出PWM功能。
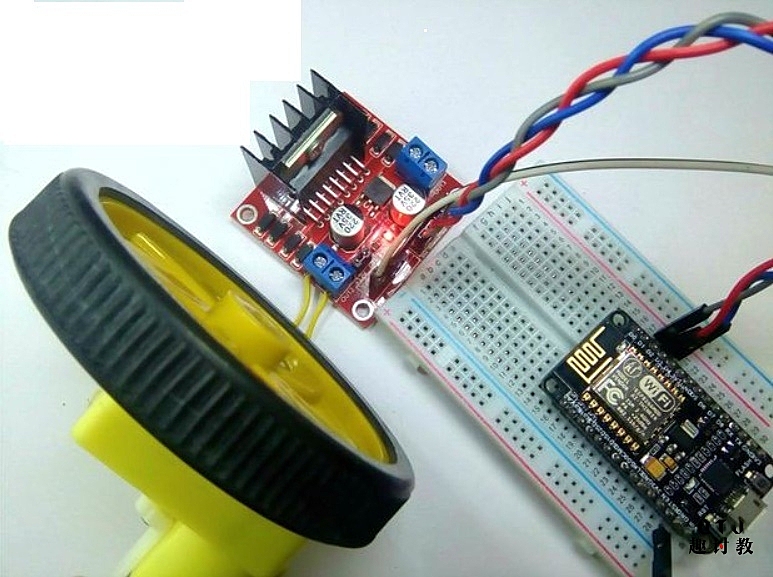
步骤4:接线连接
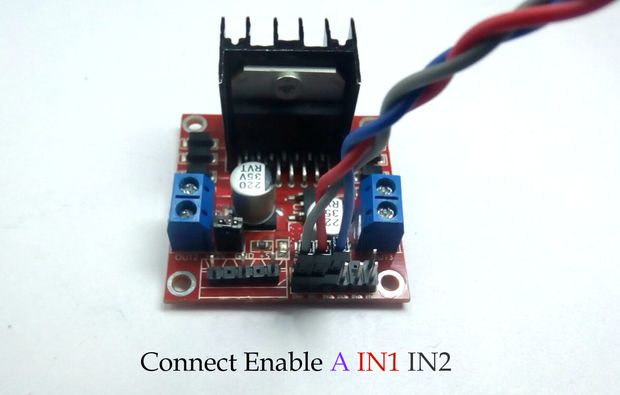
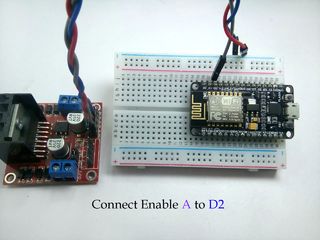
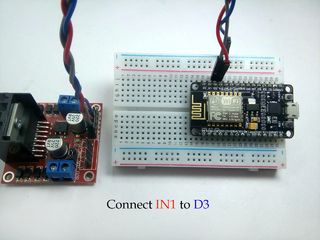
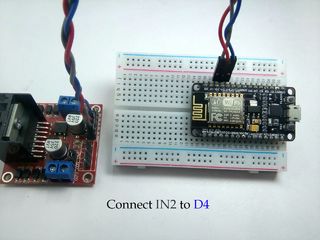
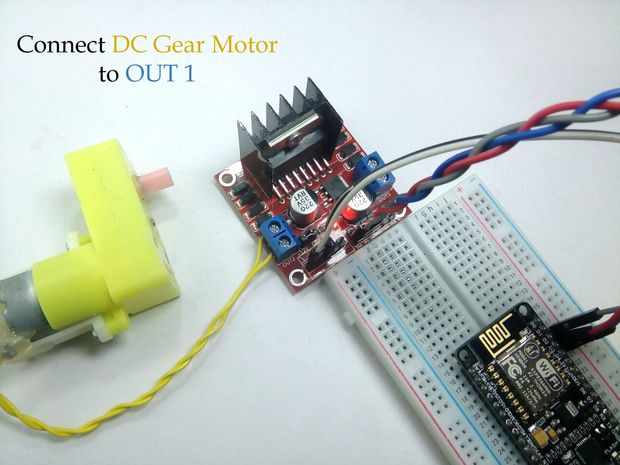
连线方式可以参考上图,其中需要注意的是以下引脚:
Enable A——D2
IN1——D3
IN2——D4
步骤5:开始编程
以下是本课程的程序,可参考以下程序编程:
int ENA = 4;
int IN1 = 0;
int IN2 = 2;
void setup() {
// 将所有电机控制引脚设置为输出引脚模式
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
// 这个功能将以固定速度在两个方向运行电机
void testOne() {
// 打开电机
digitalWrite(ENA, HIGH); // 将速度设置为0〜255范围内
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(2000); // 一定延时后改变电机方向
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
delay(2000); // 一定时间后关闭电机
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
// 该功能将在0~255的速度范围内运行电机
// 请注意,最大速度由电机本身和工作电压决定
// 由analogWrite()发送的PWM值是您硬件可能达到的最大速度的值
void testTwo() {
// 打开点击
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
// 从0开始加速到255
for (int i = 0; i < 256; i++)
{
analogWrite(ENA, i);
delay(50);
}
余下代码:
程序编写好之后,便可以编译上传程序!
步骤6:运行结果
运行结果图略,自行编译上传后查看。
本节课程序下载:



讲解地细致,让初学者很容易入手 ,为作者点赞!