

释放双眼,带上耳机,听听看~!
简介
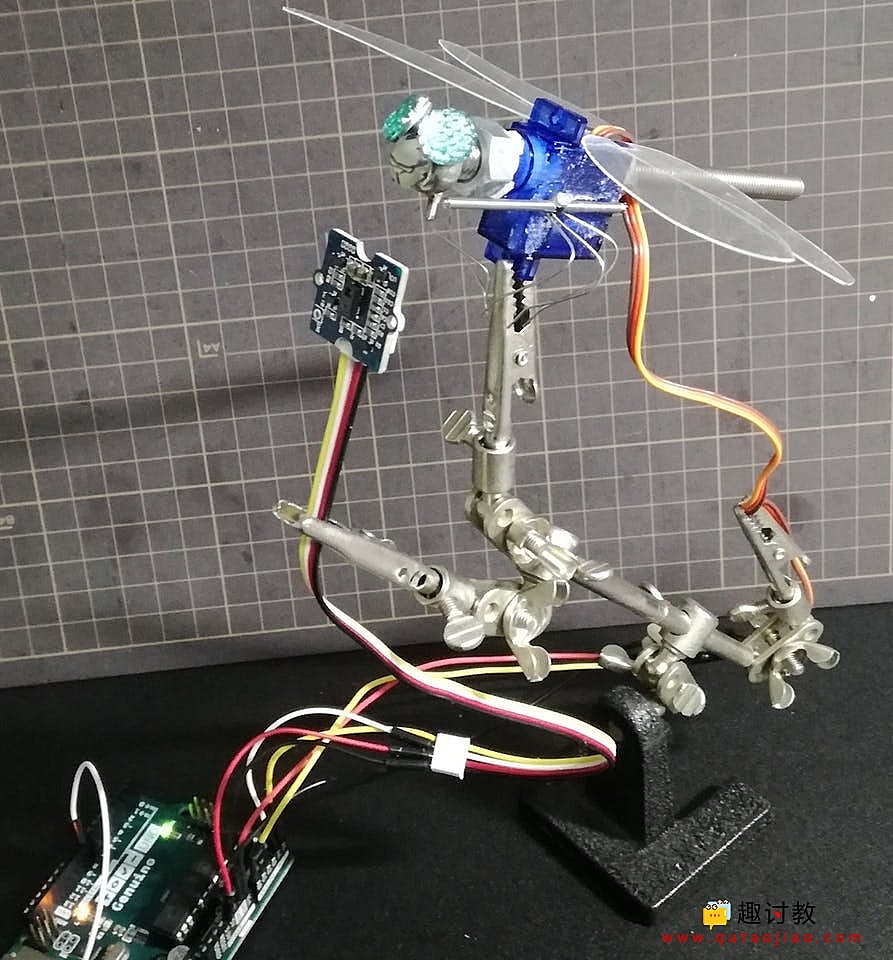
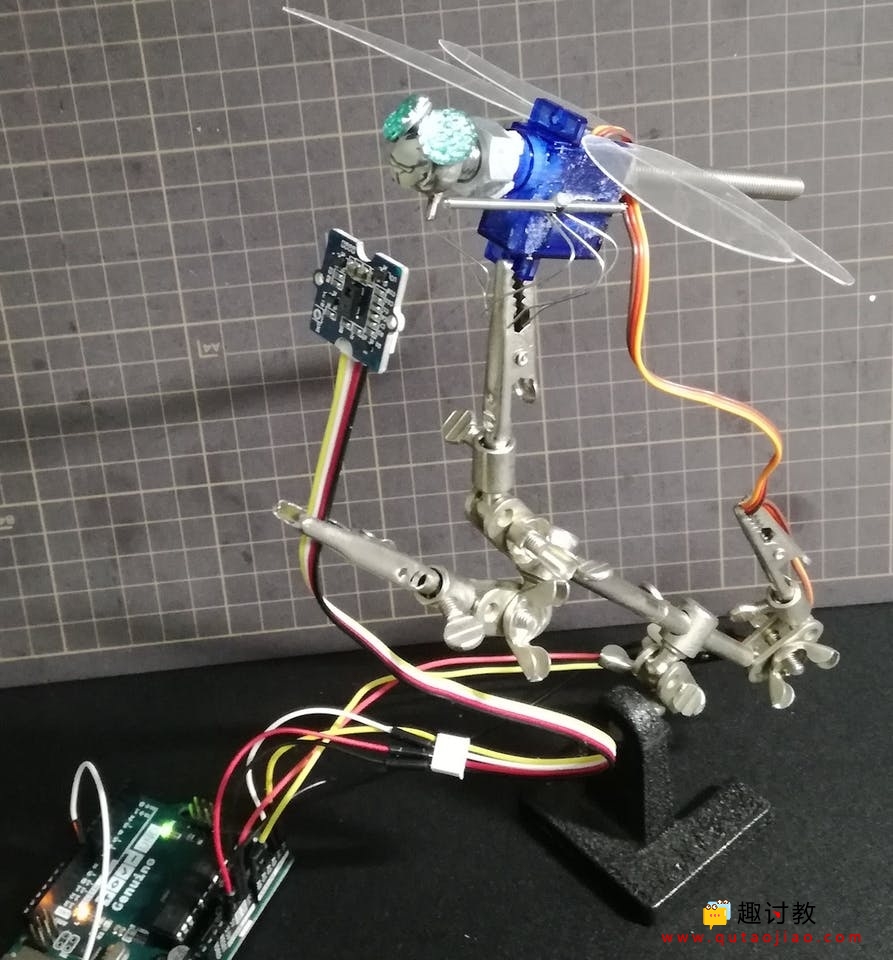
在这个项目中,将会使用到舵机进行仿生,没错,就是模仿蜻蜓扭动头部。项目其实也不难,主要是把外观之类的做好,这个项目就完成了。
步骤一 材料清单
- Arduino UNO和Genuino UNO
- Seeed Grove – 手势传感器
- FS90R微型舵机
步骤二 原理说明
用手势传感器检测手指的运动,用Arduino控制360°舵机的旋转方向。
该手势传感器能识别出手指的顺时针摆动方向和逆时针摆动方向。
360度连续旋转舵机
该舵机系统与最初包含在Arduino IDE中的舵机库一起运行,但与普通舵机略有不同。
舵机停止,90度输入
顺时针旋转0至89度输入。旋转速度从90度进一步增加。
逆时针旋转91至180度的输入。旋转速度从90度进一步增加。
步骤三 硬件搭建
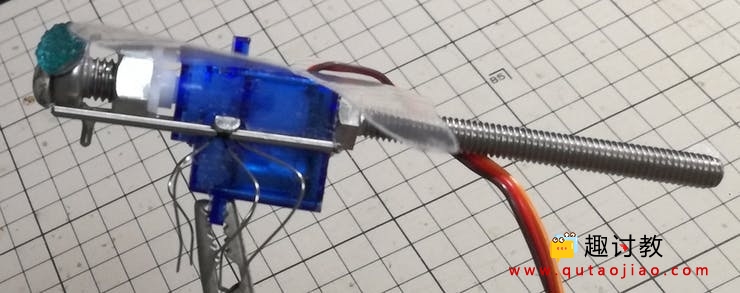
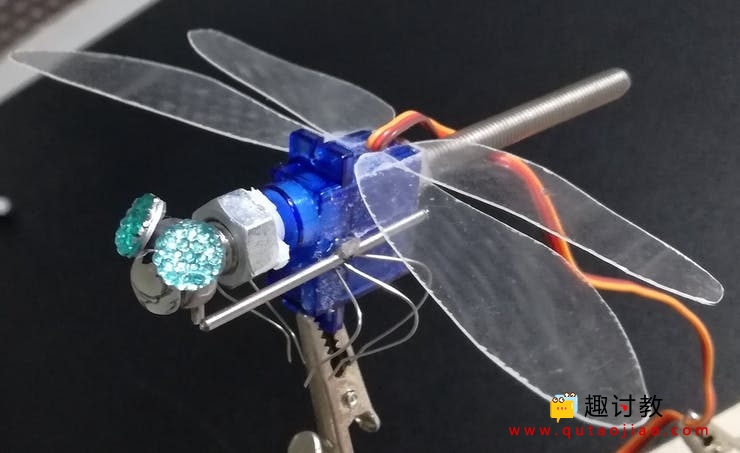
创造蜻蜓头部
头部由12毫米长的M8螺钉制成。当用舵机切割旋转磁头时,磁棒以固定的角度停止,将导线切割成适当的长度并将其焊接到螺钉上。

眼睛和嘴巴是用闪闪发光的珠宝密封制成的。嘴吧用笔画的。

头部和胸部(舵机)之间的连接由螺母组成。使用粘合剂连接附在舵机器上的翅膀和螺母。

身体

将先前制作的螺母拧到舵机机构上,然后将蜻蜓的翅膀与电线的脚部粘合在一起。

将粗线连接到舵机上,使其卡在头部更换杆上。我将细线的脚焊到这根粗线上(用于不锈钢)。
将头部拧入螺母,完成蜻蜓。打开舵机并转动它。
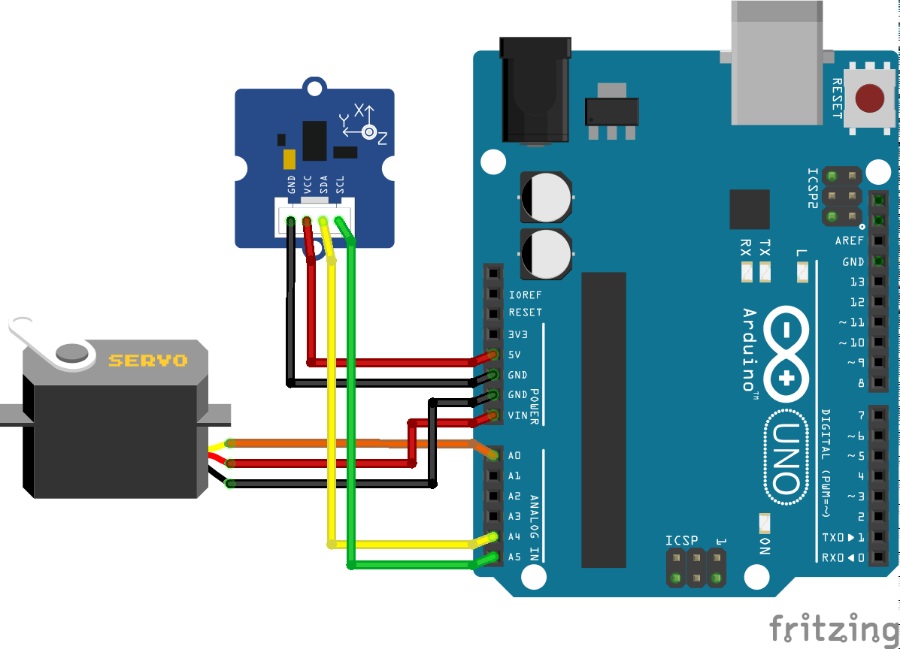
步骤四 开始编程
将舵机和手势传感器连接到Arduino UNO。
手势传感器需要使用手势传感器库,下载地址:
本项目完成程序:
步骤五 最终演示



